Обеспечение поворотливости корабля достигается использованием средств управления и движения корабля. в зависимости от конструкции и характера их использования средства управления подразделяются на главные (ГСУ) и вспомогательные (ВСУ). Действие ГСУ зависит от скорости хода корабля или от характера работы движителей. К главным средствам управления относятся рули различных типов и поворотные насадки(1).
Вспомогательные средства управления представляют собой движительно-рулевые комплексы, действие которых не связано с работой главных двигателей корабля. К вспомогательным средствам управления относятся подруливающие устройства (ПУ), активные рули (АР), выдвижные движительно-рулевые колонки (ВДРК) и поворотные колонки (ПК). В определенных условиях на некоторых проектах кораблей и подводных лодок вспомогательные средства управления могут быть использованы и как основные средства движения.
Главные средства управления. Рули и их геометрические характеристики
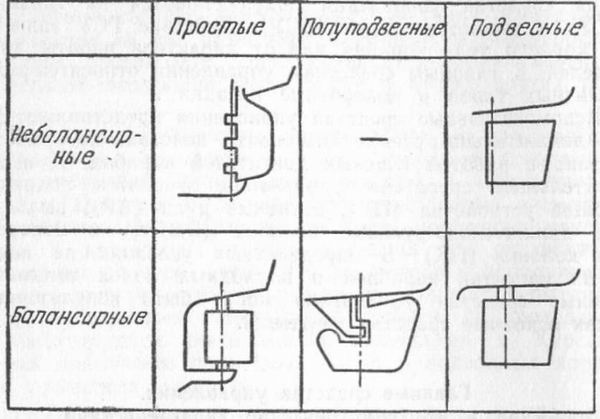
Корабельный руль представляет собой крыло симметричного профиля. По способу соединения пера руля с корпусом корабля рули бывают простые, полуподвесные и подвесные, по положению оси баллера относительно пера руля — небалансирные и балансирные(2) (рис. 1.1). На кораблях устанавливаются только балансирные или полубалансирные рули. Отношение площади балансирной части руля к остальной называется коэффициентом компенсации руля. Обычно он колеблется в пределах от 0,2 до 0,3. Наиболее важные геометрические характеристики руля: его площадь Sp, относительное удлинение λр, форма и относительная толщина профиля поперечного сечения Δр.
Площадь пера руля Sp составляет в среднем около 2% погруженной площади диаметральной плоскости (LxT).
Относительное удлинение λр = h²p/Sp, где hp — высота пера руля, обычно колеблется в пределах от 0,4 до 2,5.
Рис. 1.1. Классификация рулей
Относительная толщина профиля поперечного сечения руля Δр = lp/bр, где lр— наибольшая толщина профиля, а bp — средняя ширина руля, обычно равна 0,15—0,18.
Высота (размах) руля hp обычно определяется условиями его размещения в кормовом подзоре.
На одновинтовых кораблях устанавливается один руль, который размещается за винтом.
Двухвинтовые и трехвинтовые корабли могут иметь один или два руля. В первом случае руль располагается в диаметральной плоскости (ДП), а во втором — симметрично за бортовыми винтами.
Положение руля относительно набегающего на него потока характеризуется углом перекладки руля ар и углом атаки а.
Углом перекладки руля ар называется угол поворота руля, измеренный в плоскости, перпендикулярной к оси баллера. ар морских судов обычно ограничивается 35° Углом атаки руля а называется угол, образованный плоскостью симметрии руля и плоскостью, проходящей через ось баллера и совпадающей с направлением набегающего потока.
Рис. 1.2. Пропульсивная наделка на руле
Для повышения пропульсивного к. п. д. гребного винта на рулях иногда устанавливают пропульсивные (грушевидные) наделки (рис. 1.2). Положительный эффект пропульсивных наделок сводится к выравниванию попутного потока и уменьшению завихрений при работе винта.
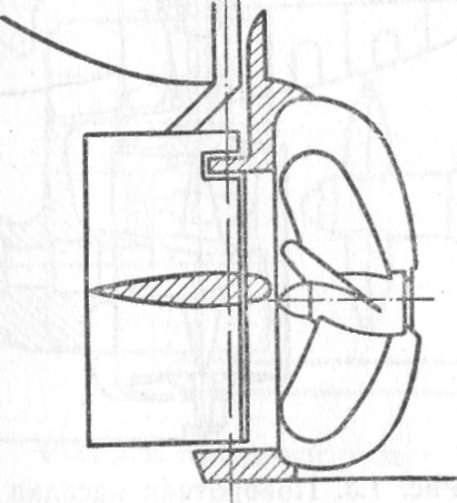
Поворотные насадки представляют собой направляющую насадку гребного винта, укрепленную на вертикальном баллере, ось которого пересекается с осью гребного винта в плоскости диска винта (рис. 1.3). Поворотная направляющая насадка является частью движительного комплекса и одновременно служит органом управления, заменяя руль.
Выведенная из ДП насадка работает как кольцевое крыло, на котором возникает боковая подъемная сила, вызывающая поворот корабля. Возникающий на баллере насадки гидродинамический момент (как на переднем, так и на заднем ходу) стремится увеличить угол ее перекладки. Чтобы снизить влияние этого отрицательного момента, в хвостовой части насадки устанавливается стабилизатор с симметричным профилем.
Активный руль (рис. 1.4) представляет собой обычный руль с установленным на нем вспомогательным винтом в короткой насадке. Винт приводится в действие электродвигателем, размещенным в герметичном корпусе.
Мощность электродвигателя составляет около 8—10% мощности главной энергетической установки, а диаметр вспомогательного винта принимается равным 20—25% основного. Активный руль обеспечивает движение корабля со скоростью 3—4 уз. Наиболее эффективно его использование в режиме, близком к швартовному. Такой руль обеспечивает разворот корабля без хода, практически на месте. Привод активного руля допускает его разворот относительно ДП корабля до 70—90°. При выключенном электромоторе активный руль действует, как обычный.
Рис. 1.4. Активный руль
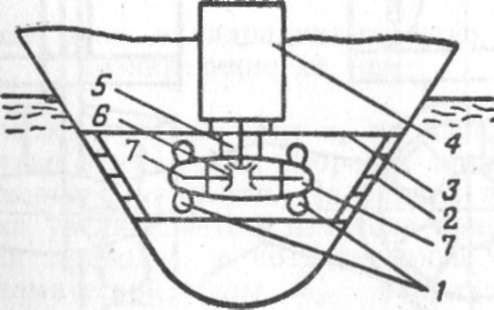
Подруливающее устройство (рис. 1.5) конструктивно представляет собой цилиндрическую трубу 3 в корпусе судна с размещенным в нем движителем 1, способным создавать тягу в двух противоположных направлениях, перпендикулярных к ДП.
Рис. 1.5. Принципиальная схема подруливающего устройства с основными противоположно вращающимися винтами
Входные кромки канала для повышения эффективности ПУ закруглены. На входе ПУ устанавливаются защитные решетки 2. Мощность от двигателя 4 передается через вертикальный вал 5, конический редуктор 6 и горизонтальные валы 7. По типу движителей различают подруливающие устройства с гребными винтами (винт фиксированного шага — ВФШ и винт регулируемого шага — ВРШ), крыльчатым движителем или реверсивными насосами. Обычно подруливающее устройство располагается в носовой или кормовой части.
Иногда применяются два устройства — носовое и кормовое. Как показывает опыт эксплуатации, эффективность действия подруливающих устройств резко снижается с увеличением скорости хода.
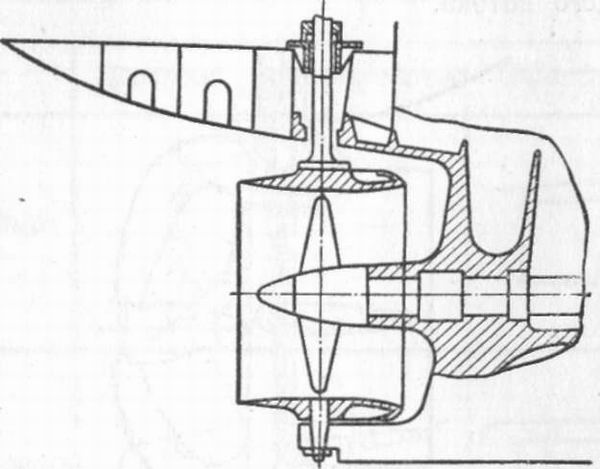
Выдвижная движительно-рулевая колонка (рис. 1.6). Движителем в ВДРК является винт 1, расположенный в направляющей насадке 2. Мощность к винту передается от электродвигателя 3 через вертикальный вал 4, верхний цилиндрический редуктор 5, вертикальный шлицевой вал 6, расположенный внутри баллера колонки 7, и нижний угловой редуктор 8. Механизм поворота 9 обеспечивает разворот комплекса винт — насадка на любой угол. Подъем и опускание комплекса производятся с помощью механизма подъема 10 в виде телескопического гидроцилиндра.
Поворотные колонки по своему принципиальному устройству схожи с ВДРК, но не имеют механизма подъема. В ряде случаев используются откидные поворотные колонки.
Из перечисленных выше САУ наиболее эффективны ВДРК: Они могут убираться на ходу корабля и не создают дополнительного сопротивления.
Эффективность любого САУ характеризуется удельной тягой, т. е. тягой на единицу затраченной мощности. Обычно она составляет не менее 10 кгс/л. с. САУ может использоваться как совместно с главным движительно-рулевым комплексом, так и самостоятельно. Они находят широкое применение для швартовки, разворота в узкости при отсутствии хода и малых ходах.
Действие руля и гидродинамические силы, возникающие на нем
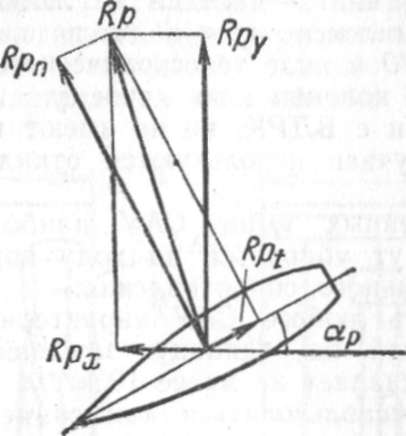
При перекладке руля на угол αр на передней его плоскости вследствие уменьшения скорости потока возникает область повышенного давления. На задней плоскости, где скорость потока увеличивается, давление понижается. Разность давлений приводит к возникновению результирующей гидродинамической силы Rp, направленной почти перпендикулярно к плоскости пера руля и приложенной в центре его давления(4).
Величина Rp зависит от площади пера руля, угла атаки и примерно пропорциональна квадрату скорости потока воды, набегающего на руль.
Для рассмотрения действия руля равнодействующую Rp раскладывают на составляющие в осях координат, неизменно связанных с кораблем: Rpy (подъемная сила), Rpx (лобовое сопротивление) и составляющие относительно оси баллера Rpn и Rpt (нормальная и тангенциальная соответственно) (рис. 1.7).
Рис. 1.7. Гидродинамические силы, действующие на руль
Гидродинамические силы связаны с равнодействующей и между собой следующими отношениями:
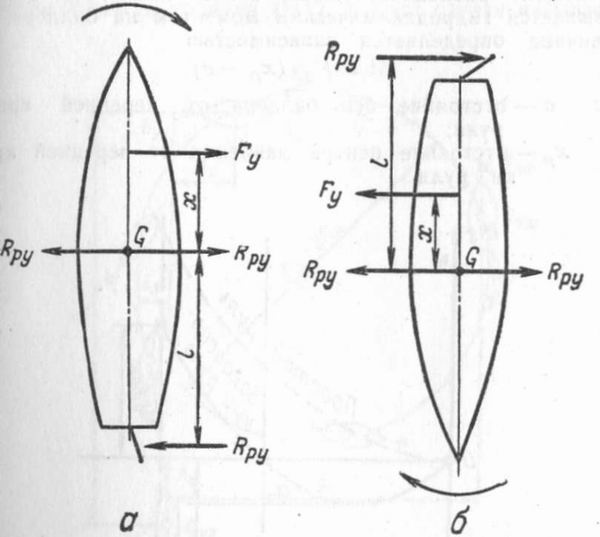
Действие руля на переднем ходу (рис. 1.8, а). Перекладка руля на переднем ходу сопровождается появлением боковой гидродинамической силы Rpy. Прикладывая в центре тяжести корабля G две равные и противоположно направленные силы Rpy получают момент Rpyl. Действие момента RPyl сопровождается обратным смещением корабля и появлением угла дрейфа α. Наличие угла дрейфа приводит к образованию боковой силы Fy, приложенной в центре сопротивления корабля и обратной по направлению Rpy. Таким образом, разворачивающий момент при движении корабля на переднем ходу определится как сумма моментов от сил RPy и Fy:
Рис. 1.8. Силы, действующие на корабль при перекладке руля
Действие руля на заднем ходу (рис. 1.8,6). На заднем ходу перекладка руля также вызывает появление силы RPy действие момента RPyl и возникновение дрейфа корабля. Появление дрейфа также сопровождается возникновением силы Fy и действием момента Fyx. Однако действие Fyx противоположно по направлению действию Rpyl.
Таким образом, разворот корабля на заднем ходу будет происходить под действием разности моментов;
Поэтому управляемость кораблем под действием руля на заднем ходу значительно хуже, чем на переднем. Выход из установившейся циркуляции заднего хода с помощью одного руля практически невозможен.
Момент равнодействующей относительно оси баллера называется гидродинамическим моментом на баллере. Его величина определяется зависимостью
где а — отстояние оси баллера от передней кромки руля;
Xр — отстояние центра давления от передней кромки руля.
Рис. 1.9. Гидродинамические моменты на баллере простого и балансирного руля
У балансирного руля (рис. 1.9) при малых углах перекладки центр давления располагается впереди, а при больших — позади оси баллера. У простого руля по мере увеличения угла перекладки центр давления все время удаляется от оси вращения. Это приводит к постоянному возрастанию гидродинамического момента на баллере. При этом для перекладки руля нужна рулевая машина большой мощности.
Циркуляция корабля
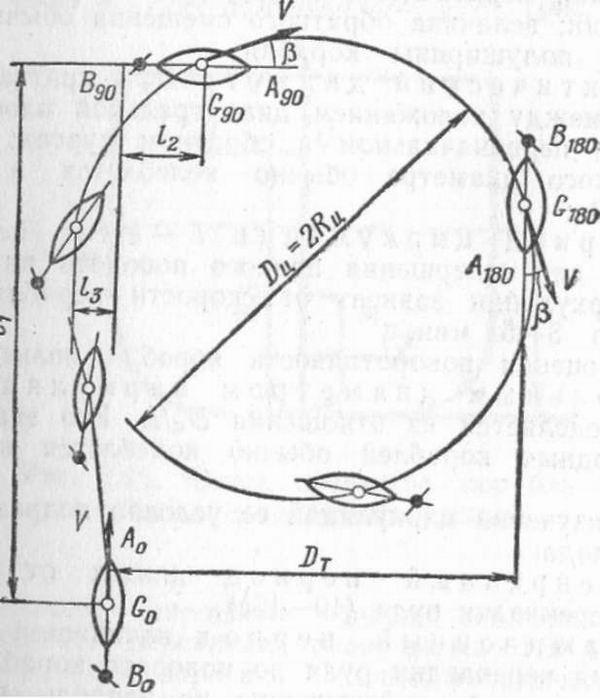
При выводе руля из ДП на некоторый угол корабль начнет совершать криволинейное движение по незамкнутой кривой спирального типа. Траектория, описываемая центром тяжести корабля (ЦТ), в этом случае называется циркуляцией (рис. 1.10).
Рис. 1.10. Циркуляция корабля
Когда движение корабля установится, циркуляция становится окружностью. Диаметр этой окружности называется диаметром циркуляции Dц.
Характеристики циркуляционной кривой:
- выдвиг l1; — расстояние, проходимое центром тяжести корабля в направлении прямого курса от момента начала перекладки руля до поворота на 90°; величина выдвига меняется в пределах 0,6—1,2 Dц;
— прямое смещение l2 — расстояние по перпендикуляру к первоначальному курсу, на которое смещается центр тяжести корабля в сторону циркуляции к моменту его поворота на 90°; величина прямого смещения изменяется в пределах 0,25—0,50 Dц;
— обратное смещение l3 — наибольшее расстояние, на которое смещается центр тяжести корабля от направления первоначального курса в сторону, обратную циркуляции; величина обратного смещения обычно не превосходит полуширины корабля;
— тактический диаметр DT — кратчайшее расстояние между положением диаметральной плоскости корабля на первоначальном и обратном курсах; величина тактического диаметра обычно колеблется в пределах 0,9-1,2 Dц;
— период циркуляции Т — время, необходимое кораблю для совершения полного поворота на 360°. Период циркуляции зависит от скорости корабля и равен примерно 3—5 мин.
Для оценки поворотливости корабля пользуются относительным диаметром циркуляции, который определяется из отношения Dц/L. Его значение для быстроходных кораблей обычно колеблется в пределах 4—7.
При изучении циркуляции ее условно подразделяют на три периода.
Маневренный период длится от начала до конца перекладки руля (10—15с).
Эволюционный период начинается с момента окончания перекладки руля до поворота корабля на 90— 180°, когда силы, действующие на корабль, приходят в равновесие. После этого начинается период установившейся циркуляции, который продолжается, пока не будет изменено положение руля.
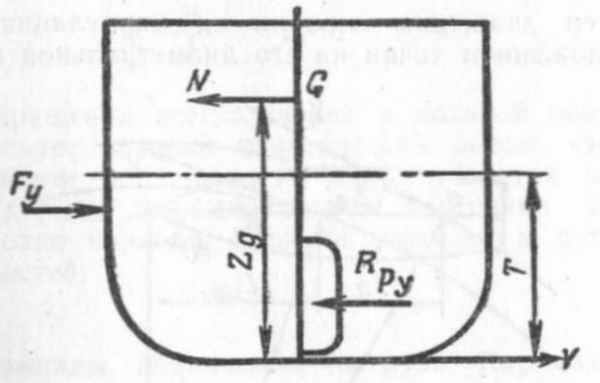
Крен корабля на циркуляции
Перекладка руля на корабле, следующем прямолинейным курсом, приводит к искривлению траектории движения в сторону, обратную перекладке руля. В результате возникает центробежная сила, момент которой вызывает небольшой крен на тот борт, куда был переложен руль.
Этот крен обусловливается также моментом боковой силы, действующей на руль. По мере изменения кривизны траектории центробежная сила сначала уменьшается, а затем увеличивается. Под действием момента этой силы, приложенной к ЦТ корабля, корабль начинает крениться в сторону, обратную направлению перекладки руля, причем первое наклонение корабля тем больше, чем больший угол крена он имел в сторону перекладки руля (рис. l.ll).
Рис. 1.11. Силы, кренящие корабль на установившейся циркуляции
Максимальное наклонение корабля в сторону, обратную направлению перекладки руля, называется динамическим углом крена. Обычно динамический угол крена превосходит крен на установившейся циркуляции в 1,3 2 раза. Максимальное значение угла крена на установившейся циркуляции определяется по формуле Г. А. Фирсова:
Где V0 — скорость корабля на прямом курсе до начала циркуляции, м/с;
T - средняя осадка корабля, м;
h - начальная поперечная метацентрическая высота, м;
L —длина корабля, м; Zg — ордината центра тяжести корабля, м. Из формулы следует, что в определенных условиях выполнять циркуляцию на большой скорости опасно. Особенно важно это учитывать при плавании на попутном волнении и при выполнении поворота на ветер.
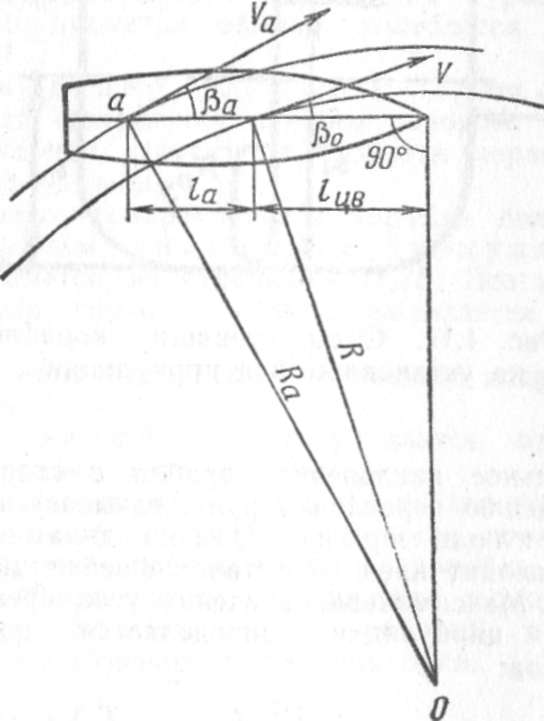
Центр вращения корабля
Характер движения корабля на циркуляции определяется положением точки на его диаметральной плоскости, угол дрейфа которой &beta=0.
Рис. 1.12. Центр вращения корабля
Геометрически положение этой точки определяется пересечением ДП корабля с перпендикуляром, опущенным на нее из центра циркуляции (рис. 1.12). Эта точка называется центром вращения корабля. Ее положение по длине корабля характеризуется значением Lцвв—Rβo. Расстояние lцв, выраженное в долях длины корабля L по ватерлинии:
Абсолютное значение этой величины при углах перекладки руля, превышающих 20°, лежит в пределах
Центр вращения всегда лежит в носовой оконечности. Отсюда следует важный практический вывод, что управление кораблем на поворотах осуществляется перемещением его кормы. Это необходимо постоянно учитывать при швартовке корабля, проходе узкостей и навигационных опасностей.
Команды, подаваемые на руль. Порядок выполнения поворотов
«Командир корабля назначает курс и скорость корабля через вахтенного офицера»(5). В отдельных случаях (при определении маневренных элементов, поправок приборов и плавании в узкости) по решению командира корабля право непосредственной подачи команды на руль может быть предоставлено штурману.
Для успешного выполнения поворотов с помощью руля командиру корабля, штурману и вахтенному офицеру должны быть известны следующие данные:
— диаметр циркуляции при перекладке руля на различные углы вправо и влево при различных режимах работы главных машин;
— время описания полной циркуляции и части ее при различных скоростях и комбинациях работающих машин;
— потеря скорости на циркуляции при перекладке руля на установленное число градусов для различных скоростей хода;
— «мертвый промежуток» времени от момента подачи команды рулевому до начала фактического поворота;
— возможная величина угла крена корабля на циркуляции в зависимости от скорости хода.
— перед подачей команды на руль необходимо оценить обстановку и принять все меры для безопасного выполнения маневра;
— прибегать к перекладке руля «на борт» следует только в случае крайней необходимости (при развороте корабля в узкости, для избежания столкновения с другим кораблем, уклонения от обнаруженной навигационной опасности и атак противника);
— необходимо обеспечить возможность быстрого перехода на запасные посты управления рулем;
— при совместном плавании поворот корабля должен быть обозначен установленным флажным или световым сигналом с момента подачи команды на руль до конца поворота;
— при изменении курса в строю кильватера поворот следует осуществлять так, чтобы форштевень шел по внутренней кромке кильватерной струи впереди идущего мателота.
Команды на руль должны подаваться в строгом соответствии с «Командными словами» (приложение к Корабельному уставу ВМФ). Поданные команды рулевой обязан репетовать громким голосом, предваряя их словом «Есть».
Приняты следующие основные команды на руль:
Команда «Право (лево) на борт» означает, что руль должен быть положен до установленного предела в указанную сторону. Команда подается с учетом быстрой перекладки руля.
По команде «Право (лево) руля» рулевой обязан переложить руль на установленное число градусов (для данного корабля) в указанную сторону и доложить: «Руль право (лево) столько-то». В процессе выполнения поворота рулевой докладывает через каждые 10° новые значения курса. Эта команда подается при выполнении обычных поворотов на новый курс и совместном маневрировании с однотипными кораблями.
При выполнении поворота с большим или меньшим, чем обычно, диаметром циркуляции подается команда «Столько-то градусов право (лево) руля».
Команда «Отводить» подается при приближении корабля к назначенному курсу (обычно на 10—15°). По этой команде руль отводится в ДП корабля, после чего рулевой докладывает: «Руль прямо». Аналогичные действия выполняются и по команде «Прямо руль». Команда подается при необходимости прервать выполнение поворота. После команд «Отводить» и «Прямо руль» рулевой докладывает курс через каждые 3°.
Команда «Одерживать» подается, когда до назначенного нового курса осталось 3—5°. По этой команде руль перекладывается на небольшое число градусов в сторону, обратную циркуляции. Рулевой докладывает курс по компасу через каждый градус.
Команда «Так держать» означает, что рулевой должен заметить по компасу с точностью до градуса курс, на котором лежал корабль в момент подачи команды, или направление по береговому ориентиру и удерживать корабль на этом курсе, доложив: «Есть, так держать, на румбе столько-то градусов».
Команда-запрос «На румбе» означает, что рулевой должен заметить курс по компасу и доложить: «На румбе столько-то градусов».
Команда «Столько-то градусов право (лево) по компасу» означает, что рулевой должен изменить курс на указанное число градусов, после чего доложить: «На румбе столько-то градусов». Команда подается в случаях, когда необходимо изменить курс корабля не более чем на 15—25°.
Опытному рулевому могут быть поданы команды: «Право (лево) руля. Курс столько-то градусов»; «Держать в кильватер такому-то кораблю»; «Лечь на створ»; «Оставить такой-то предмет справа (слева)» и т. д.
В этом случае рулевой самостоятельно выполняет указанные действия и докладывает: «На створе. На румбе столько-то градусов» или «На румбе столько-то градусов» и т. д.
Использование авторулевого
В последние годы для автоматизации управления кораблем на заданном курсе основным средством управления рулем являются автоматические стабили-заторы курса (авторулевые). Автоматическое управление курсом по сравнению с ручным облегчает работу вахтенного рулевого и обеспечивает более точное удержание корабля на курсе, уменьшает рыскание и обеспечивает выполнение заданных поворотов. Применение авторулевого предусматривает возможность использования программного устройства или системы дистанционного управления. В зависимости от задач, выполняемых авторулевым, возможны два режима его работы.
1. Режим стабилизации. В этом режиме авторулевой должен обеспечить движение корабля на прямом курсе с наименьшими углами рыскания.
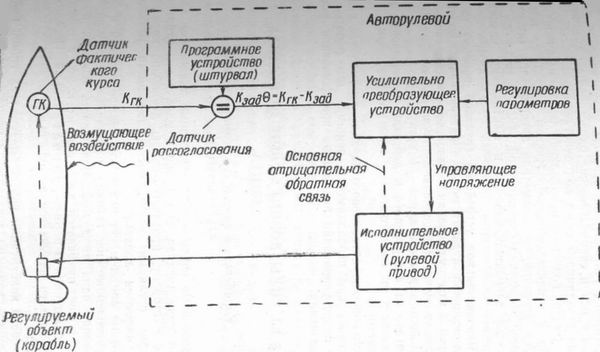
2. Режим управления. В этом режиме авторулевой должен обеспечить изменение направления движения корабля в соответствии с требованиями эксплуатации. При этом изменение угла курса может быть выполнено с использованием программного регулирования (по заранее заданному закону) или с помощью системы дистанционного управления. Система автоматического управления курсом обычно состоит из объекта регулирования и авторулевого (регулятора). Объектом регулирования является корабль, угол курса которого о представляет регулируемую величину, а угол отклонения руля ар — управляющее воздействие. Функции авторулевого выполняет специальная следящая система, обеспечивающая отклонение руля.
Принципиальная схема авторулевого включает в себя следующие элементы (рис. 1.13):
1. Датчик фактического курса Кгк обеспечивает измерение знака и величины рассогласования (отклонение курса корабля от заданной величины), а также выдачу управляющего сигнала. Функции чувствительного элемента обычно выполняет гирокомпас.
2. Программное устройство — датчик заданного курса — обеспечивает программное управление курсом, который может быть задан вручную, жесткой программой (зигзаг) или корабельной ЭЦВМ.
3. Датчик рассогласования служит для выработки сигналов управления при отклонении корабля от заданного курса.
4. Усилительно-преобразующее устройство обеспечивает усиление сигнала управления и выработку корректирующих сигналов, учитывающих скорость ухода корабля с заданного курса и систематическое одностороннее уклонение корабля с заданного курса под действием различных факторов (ветер, волнение, парциальная работа машин и т. д.).
Рис. 1.13. Принципиальная схема авторулевого
Обычно в усилительно-преобразующем устройстве предусмотрена регулировка параметров авторулевого (чувствительности, коэффициента обратной связи и т. д.) по маневренным элементам корабля и фактическим условиям плавания.
5. Исполнительное устройство (рулевой привод) имеет датчик основной отрицательной обратной связи, предназначенный для улучшения качества автоматического управления рулем (обеспечивает затухание колебаний корабля около заданного курса — Кзад).
Подготовка авторулевого к действию и включение его производятся в соответствии с эксплуатационными инструкциями.
Обслуживание авторулевого на ходу заключается в переключении при необходимости режимов его работы, а также подрегулировании параметров при изменении условий плавания.











 Важное
Важное

 Важное
Важное
 Важное
Важное
 Важное
Важное