Современные РЛС дают возможность судоводителю не только осуществлять общую ориентировку и определять местоположение судна
относительно ориентиров, но и определять скорость, поправку лага,
элементы циркуляции своего судна, а также элементы движения
встречных судов.
Определение скорости и поправки лага. Скорость и поправки лага определяют так же, как и на мерной линии, но независимо от условий видимости. Место, где будут это производить, должно удовлетворять требованиям, предъявляемым к месту расположения мерной
линии, а вместо створов необходимо иметь лишь буй с пассивным отражателем или судно, стоящее на якоре. Для работы должны быть выделены наблюдатели — один у ИКО РЛС, второй у тахометров и третий — у счетчика лага. Все три наблюдателя должны иметь секундомеры.
Судно проводят против ветра или течения курсом прямо на буй
(стоящее судно) и машинам задают нужный режим работы. Подвижный круг дальности (ПКД) на ИКО или масштабную линейку на
визире при неподвижном круге дальности (НКД) устанавливают на
заранее намеченное положение относительно эхо-сигнала буя, которое должно соответствовать определенному расстоянию до буя,
например 4 или 6 милям, но так, чтобы к моменту прихода эхо-сигнала
буя к ПКД (масштабной линейки НКД) судно имело установившуюся
скорость при заданном режиме работы машин. В момент, когда эхо-
сигнал буя на ИКО коснется ПКД (отсчета масштабной линейки
НКД), все наблюдатели по сигналу пускают секундомеры, записывают число оборотов движителя и показание лага. Сразу же после
этого ПКД (масштабная линейка НКД) устанавливается в новое,
меньше первого на 1—3 мили, положение относительно эхо-сигнала
буя, но в масштабе той же шкалы дальности.
Рис. 105
Направляя судно, как можно точнее, прямо на буй в момент,
когда эхо-сигнал подойдет к ПКД вторично (к отсчету на масштабной линейке НКД) , секундомеры останавливают, записывают число
оборотов движителя и отсчет лага.
Разность установок ПКД (отсчетов масштабной линейки НКД)
даст расстояние 5, пройденное судном за средний промежуток времени Т, определяемый по показаниям трех секундомеров, а разность
отсчетов лагов (ол2 — ол1) дает рол. Обороты движителей, если были
замечены изменения, нужно привести к средним.
Аналогично производят наблюдения на втором галсе, приведя
эхо-сигнал буя прямо по корме.
Когда судно пройдет двумя-тремя галсами при каждом заданном
режиме работы машин на каждом из них определяют S, t и рол, по
формулам (18) — (26а) рассчитывают скорость судна, поправку лага
и составляют таблицу соответствия скорости хода оборотам движителей .
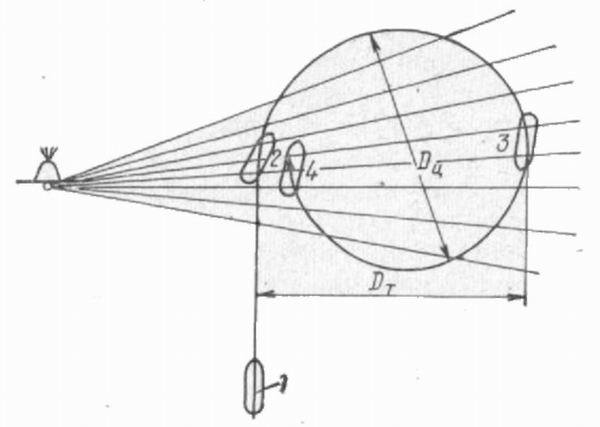
Определение элементов циркуляции. На траверзе эхо-сигнала
буя (рис. 105) перекладывают руль на заданный угол вправо, включают одновременно три секундомера, измеряют по РЛС расстояние
до буя и курсовой угол, замечают курс судна по компасу. Когда
судно начнет поворот вправо, останавливают один из секундомеров
и по его отсчету узнают величину «мертвого промежутка» (на рис. 105
точка 2). Далее через каждые 15—20 сек по РЛС определяют расстояния, курсовые углы и одновременно замечают КК, ведя записи этих
данных, а также показания секундомеров от начала наблюдений до
поворота, на 360°. Когда судно придет на обратный курс (точка 3),
останавливают еще один секундомер. По его показаниям определяют
полупериод циркуляции. В момент прихода судна на первоначальный
курс (точка 4) останавливают последний секундомер, который покажет период циркуляции. (При хорошей видимости, вместо курсовых
углов по РЛС и компасных курсов, в момент измерения расстояний
по РЛС до буя, берут ОКП).
По взятым КУ и КК рассчитывают КП, затем по КП или ОКП и
измеренным расстояниям на миллиметровой бумаге или специальном
планшете вычерчивают циркуляцию.
Для этого на планшете принимают некоторую точку за место нахождения буя, от нее проводят линии КП и на них откладывают в
выбранном масштабе измеренные расстояния. После чего, соединив
все точки на линиях КП плавной кривой, получают циркуляцию
судна, по которой снимают DT Dц и определяют другие ее элементы.
Элементы движения встречного судна определяют графическим
построением на карте, бумаге или на специальном планшете. Определяют курс встречного судна и его скорость по измеренным через
определенные промежутки времени пеленгам и расстояниям до
эхо-сигнала на экране ИКО при известных курсе (или пути) и скорости судна, с которого ведут наблюдения.
Продолжительность промежутков времени между измерениями
пеленгов и расстояний до встречного судна будет зависеть от расстояния, на котором находится одно судно от другого, и скорости сближения, а точность определения — от числа наблюдений. При малых
расстояниях и большой скорости сближения наблюдения проводят
с интервалом в 1 мин, при сравнительно больших — через 2 мин,
при этом должно быть выполнено не менее трех измерений. Поэтому
при ограниченной видимости РЛС включают заблаговременно и систематически ведут наблюдения за появлением на ИКО эхо-сигналов.
В момент появления эхо-сигнала определяют пеленг (курсовой
угол) и расстояние до него, замечают время по судовым часам и отсчет лага, пускают секундомер. Через 1 или 2 мин по секундомеру
вторично определяют пеленг и расстояние до этого эхо-сигнала, замечают отсчет лага.. Затем через такой же промежуток времени в третий раз определяют пеленг, расстояние до того же эхо-сигнала и замечают отсчет лага.
После этого приступают к графическому построению, которое
может быть выполнено способами истинной или относительной прокладок.
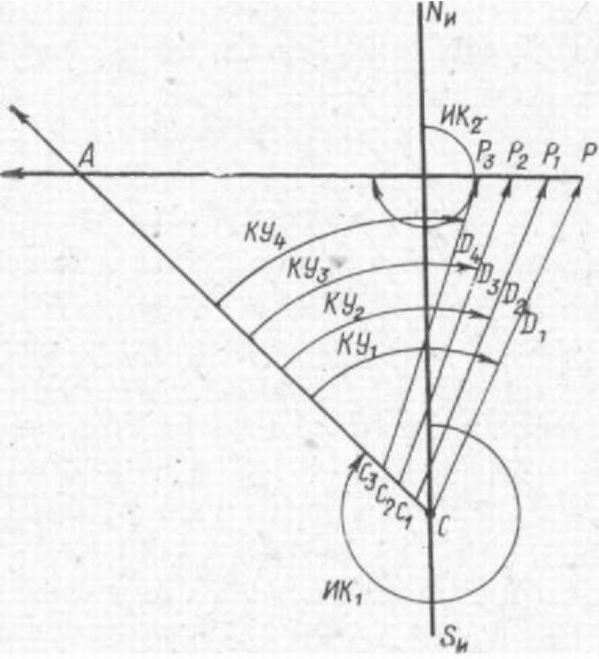
Способ истинной прокладки удобен тем, что он
позволяет воспроизвести наглядно на листе бумаги или на карте
действительное движение обоих судов. На листе бумаги (рис.106)
проводят прямую, изображающую линию истинного NИSИ, и из произвольной точки С на ней строят угол, равный ИК1 (ПУ) своего судна
и проводят линию, которая будет изображать линию истинного курса
(пути). На этой линии от точки С наносят точки С1, С2, С3 и т. д.,
с расстоянием между ними, в принятом масштабе, равным расстоянию, проходимому своим судном за промежуток времени между (наблюдениями (за 1 или 2 мин). В точках С, С1 С2 и С3 строят углы
с линией ИК (ПУ), равные курсовым в момент наблюдения, и проводят линии (линии пеленгов), по которым откладывают в том же масштабе измеренные расстояния и получают точки Р, Р1 Р2, Р3. Прямая,
проходящая через данные точки, представляет линию перемещения
наблюдаемого судна, т. е. линию его И К (или линию ПУ), а угол,
составляемый ею с линией NИSИ даст ИК2 (ПУ) этого судна. Длина
отрезков РР1, Р1Р2 и Р2Р3 в принятом масштабе дает расстояния
в милях, проходимые этим судном за наблюдаемые промежутки времени (1 или 2 мин). Если промежутки времени были приняты в 1 мин
(всего 3 мин, или 1/20 ч), то для
определения скорости наблюдаемого судна полученное расстояние РР 3 в милях умножают на
20, а если промежутки времени
были приняты в 2 мин (всего
6 мин или 1/10 ч), то умножают
на 10 и получают скорость наблюдаемого судна.
Рис. 106
При таком построении можно получить точку пересечения
линии курсов обоих судов (точку А) и определить время, когда суда могут оказаться в этой
точке, если они не будут менять
свои курсы и скорости.
Способ относительной прокладки проще
и выполняется быстрее, чем
описанный выше, но лишен
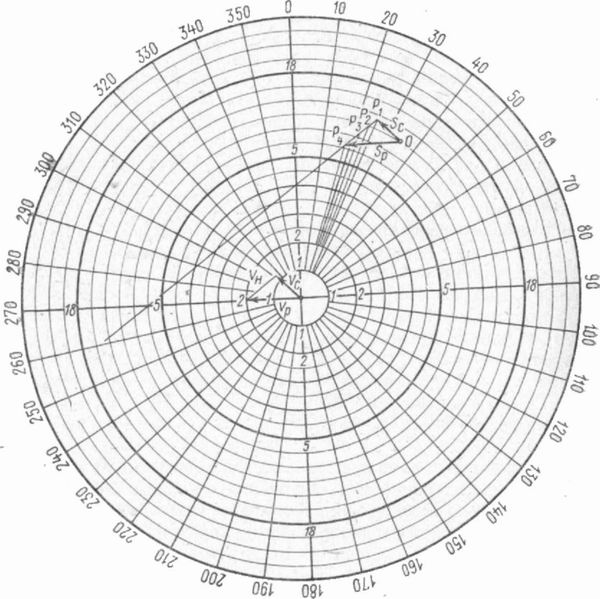
наглядности, так как отражает только перемещение эхо-сигнала наблюдаемого судна на экране РЛС. Относительную прокладку выполняют
на специальном маневренном планшете. Свое судно принимают в центре
планшета, как в действительности на экране РЛС — в его центре. На
линиях наблюдаемых пеленгов от центра планшета (рис. 107)
откладывают измеренные расстояния D1 D2 D3 и D4; полученные
точки Р1 Р2, Р3 и Р4 соединяют прямой и получают линию относительного курса наблюдаемого судна, а отрезок этой линии P1P4 представляет расстояние относительного перемещения этого судна.
Для определения ИК2 и скорости наблюдаемого судна строят
треугольник скоростей у центра планшета. По линии курса своего
судна откладывают вектор его скорости vc за время наблюдений,
а из конца этого вектора параллельно линии относительного курса
наблюдаемого судна — вектор его скорости vн, по величине, равной
Р1Р4, и, соединив конец этого вектора с центром планшета, получают
вектор vр истинной скорости наблюдаемого судна; величина этого
вектора в принятом масштабе дает скорость, а направление — истинный курс наблюдаемого судна. Для определения элементов движения наблюдаемого судна по РЛС можно воспользоваться построением
треугольника путей на линии относительного курса наблюдаемого
судна.
Для этого от точки Р1 в направлении, обратном курсу своего
судна, откладывают расстояние, пройденное им за время наблюдений (3 или 6 мин), направление же вектора пути SС должно быть в
сторону движения своего судна из точки О. Затем точки О и Р4 соединяют прямой, которая будет изображать вектор SР истинного пути
(расстояние), проходимого наблюдаемым судном за тот же промежуток времени, а его направление, относительно центра планшета, истинный курс.
Рис. 107
Кратчайшее расстояние, на которое сблизятся оба судна, определяется величиной перпендикуляра в масштабе планшета, опущенного из центра планшета на линию относительного курса наблюдаемого судна.
Построения на рис. 106 и рис. 107 выполнены при ИК = 315°
и скорости судна, с которого ведут наблюдения, 12 узлов по следующим данным:
Элементы движения наблюдаемого судна определились: ИК =
270°, v = 20 узлам, кратчайшее расстояние сближения 3,3 мили.


 Важное
Важное

 Важное
Важное
 Важное
Важное
 Важное
Важное