Радиолокация — средство для обнаружения и определения положения различных объектов при помощи радиоволн. Судовые
радиолокационные станции (РЛС) работают на сантиметровых
волнах, которые, подобно световым лучам, распространяются
прямолинейно и обладают свойствами рефракции, дифракции и
интерференции. Дифракция позволяет радиоволнам двигаться
по изогнутому пути, следуя кривизне земной поверхности; рефракция увеличивает дальность радиолокационного горизонта до
2,2 hM, где hM—высота антенны радиолокатора в метрах.
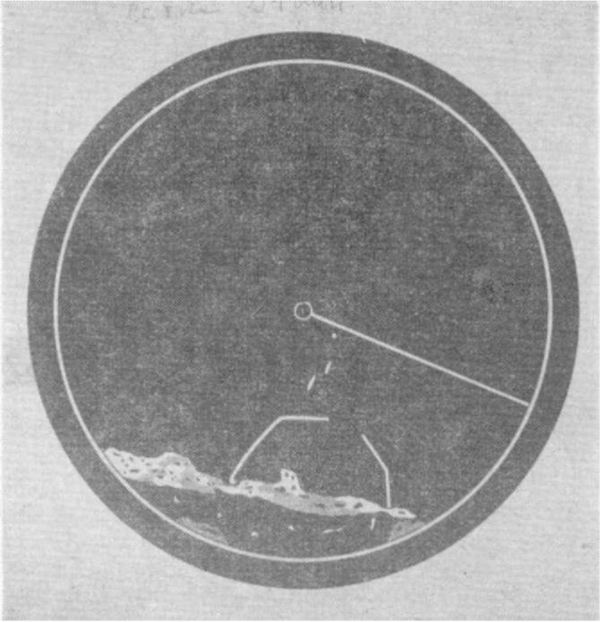
Радиоволны сантиметрового диапазона хорошо отражаются
от препятствий, встречающихся на пути их распространения. Это
позволяет обнаружить объект, измерить направление на него и
определить расстояние до него (рис. 65).
Современный радиолокатор позволяет обнаруживать объекты
в море на расстоянии более 50 миль. С его помощью можно определять место судна, снос ветром и элементы течения, осуществлять
проводку в узкостях, в условиях плохой видимости, уточнять
маневренные элементы судна и элементы движения другого судна
и т. п.
Судовая радиолокационная станция не связана с береговыми
устройствами. Автономность прибора дает ему большие преимущества перед методами определения места судна по визуальным
наблюдениям и радиопеленгованием.
Возможность определять с помощью радиолокационной судовой станции расстояния до ориентиров и пеленги на них позволяет использовать для радиолокационных определений места судна
все те способы, которые были описаны в гл. VI. Кроме того, благодаря широким возможностям судовых радиолокационных станций, появились и дополнительные способы определений: веер пеленгов и расстояний, способ параллельных расстояний и т. д. Из
всех способов определения места судна с помощью судовой радиолокационной станции предпочтение следует отдавать тем, которые
основаны на измерении радиолокационных расстояний, так как
они обычно измеряются значительно точнее, чем радиолокационные пеленги.
Рис. 65.
Однако имеется немало факторов, ограничивающих использование РЛС или значительно снижающих точность ее показаний.
РЛС не всегда может обеспечить безопасность плавания в данной обстановке. Малая ширина берегового фарватера, действие
течения, сильное волнение, неблагоприятные гидрометеорологические условия (грозовые облака, ветер, дождь) часто не позволяют полностью использовать РЛС для навигации. Пользуясь радиолокатором, трудно измерять расстояние до участка береговой
линии в тех местах, где она вдается в сторону суши; не все объекты доступны для радиолокационного наблюдения. Так, берега,
покрытые ледниками с ровной поверхностью, почти совершенно не
обнаруживаются на экране. Волна около четырех баллов часто
делает невозможным своевременно различить даже такой объект,
как встречное судно и т. п. Кроме того, очень вероятны ошибки в
опознании наблюдаемого объекта. Статистика столкновений судов
в иностранных флотах за несколько последних лет показывает,
что после широкого внедрения радиолокационной техники на торговом флоте количество столкновений увеличилось. Это явление—
прямое следствие слепого доверия к радиолокационной технике,
основанное на неправильной завышенной оценке навигационных
возможностей судовых РЛС.
Рис. 66.
Несмотря на это судовая РЛС в условиях плохой видимости
имеет исключительно важное значение для предупреждения столкновений судов в море, так как позволяет заблаговременно обнаружить встречное судно, определить наличие опасного сближения
и принять меры для его устранения согласно ППСС.
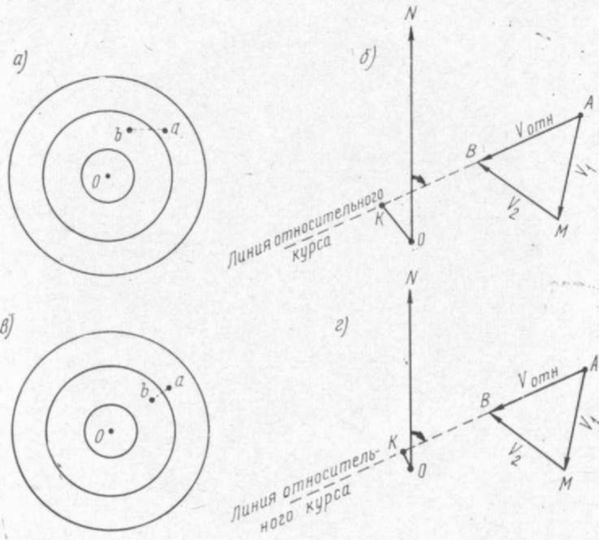
Наиболее просто и быстро такая задача решается при помощи
способа относительной прокладки, заключающегося в следующем.
На листе чистой бумаги отмечают точку О (рис. 66, б, г) , принимаемую за место своего судна(1).
На экране РЛС этой точке соответствует центр развертки. Через точку О проводят линию истинного меридиана ONИ.
Обнаружив на экране РЛС эхо-сигнал другого судна (точка а
на рис. 66, а, в) , переносят его положение на бумагу с помощью
измеренных радиолокационного пеленга и расстояния, получая
точку А (рис. 66, б, г) . Через 3—6 мин (0,05—0,10 ч) вновь переносят переместившийся на экране эхо-сигнал (точка Ъ на рис.
66, а) на бумагу, получая точку В (рис. 66, б, г) .
Таким образом, перемещение эхо-сигнала встречного судна по
экрану РЛС точно воспроизводится на бумаге. Отрезок АВ представляет собой вектор относительного перемещения судов (0,05—
0,10 длины вектора относительной скорости V0тн). Линия АВ называется линией относительного движения (ЛОЛ) . Опасность столкновения возникает в том случае, когда ЛОД проходит
через центр индикатора кругового обзора (ИКО) , т. е. через точку О (или достаточно близко к ней). Такое положение соответствует низменности пеленга на встречное судно (рис. 66,в,г). Треугольник АВМ позволяет определить элементы движения встречного
судна, _вектор скорости которого V2 — MB (рис. 66, б, г), если
V1=AM — вектор скорости судна наблюдателя.

 Важное
Важное

 Важное
Важное
 Важное
Важное
 Важное
Важное