–С–∞–љ–љ–µ—А
–Ш—В–Њ–≥–Є –Т–Є–і–µ–Њ–і–љ–µ–≤–љ–Є–Ї–∞ –Є–љ–љ–Њ–≤–∞—Ж–Є–є –≤—Л—Б—В–∞–≤–Ї–Є "–Ь–µ—В–∞–ї–ї–Њ–Њ–±—А–∞–±–Њ—В–Ї–∞-2025"
–ѓ—Е—В—Л-—А–Њ–±–Њ—В—Л –њ–Њ–і–љ–Є–Љ–∞—О—В –њ–∞—А—Г—Б–∞ –љ–∞ —И—В—Г—А–Љ –Р—В–ї–∞–љ—В–Є–Ї–Є
–Ґ—Л—Б—П—З–Є –Љ–Є–ї—М, –Ї–Њ—В–Њ—А—Л–µ –љ—Г–ґ–љ–Њ –њ—А–Њ–є—В–Є –њ–Њ–і –њ–∞—А—Г—Б–Њ–Љ, –Ї–∞–ґ—Г—В—Б—П –љ–µ —В–∞–Ї–Є–Љ —Г–ґ –Ї—А—Г–њ–љ—Л–Љ –і–Њ—Б—В–Є–ґ–µ–љ–Є–µ–Љ. –Э–Њ –≤—Б—С –Љ–µ–љ—П–µ—В—Б—П, –µ—Б–ї–Є —Г—З–µ—Б—В—М, —З—В–Њ –љ–∞ –±–Њ—А—В—Г —П—Е—В—Л –љ–µ –±—Г–і–µ—В –ї—О–і–µ–є –Є –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ —Г–њ—А–∞–≤–ї—П—В—М —Б—Г–і–љ–Њ–Љ –љ–Є–Ї—В–Њ –љ–µ –±—Г–і–µ—В. –Э–∞ —Д–Њ—В–Њ вАФ —П—Е—В–∞-—А–Њ–±–Њ—В –Є–Ј —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В–∞ –£—Н–ї—М—Б–∞ (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ roboticsailing.org). –Р–≤—Б—В—А–Є–є—Б–Ї–Є–є Roboat –њ–Њ–±–µ–і–Є–ї –≤ –њ–µ—А–≤–Њ–Љ Microtransat, —Б–Њ—Б—В–Њ—П–≤—И–µ–Љ—Б—П –≤ 2006-–Љ (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ theregister.co.uk). –°–ї–µ–≤–∞ –≤–≤–µ—А—Е—Г: 280-–Ї–Є–ї–Њ–≥—А–∞–Љ–Љ–Њ–≤–∞—П —П—Е—В–∞-—А–Њ–±–Њ—В Beagle B, –њ–Њ—Б—В—А–Њ–µ–љ–љ–∞—П –≤ –Р–±–µ—А–Є—Б—В–≤–Є—В–µ, —П–≤–ї—П–µ—В—Б—П –њ—А–µ–і—И–µ—Б—В–≤–µ–љ–љ–Є—Ж–µ–є Pinta. –Я–Њ—Б–ї–µ–і–љ—П—П –і–Њ–ї–ґ–љ–∞ –Њ–Ї–∞–Ј–∞—В—М—Б—П –Є–Ј—П—Й–љ–µ–µ (–≤—Б–µ–≥–Њ 150 –Ї–Є–ї–Њ–≥—А–∞–Љ–Љ–Њ–≤), –љ–Њ –±—Л—Б—В—А–µ–µ. –Я–Њ —А–∞—Б—З—С—В–∞–Љ –±—А–Є—В–∞–љ—Ж–µ–≤ –Њ–љ–∞ —Б–Љ–Њ–ґ–µ—В —А–∞–Ј–≤–Є–≤–∞—В—М —Б–Ї–Њ—А–Њ—Б—В—М –≤ 7,4 –Ї–Є–ї–Њ–Љ–µ—В—А–∞ –≤ —З–∞—Б. –Ю—Б–Њ–±–µ–љ–љ–Њ—Б—В–Є –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Є вАФ —Г–≥–ї–µ–≤–Њ–ї–Њ–Ї–Њ–љ–љ—Л–є –њ–∞—А—Г—Б-–Ї—А—Л–ї–Њ. –°–њ—А–∞–≤–∞ –≤–≤–µ—А—Е—Г: –Њ–і–љ–∞ –Є–Ј –Љ–Њ–і–µ–ї–µ–є –Њ—В INNOC, —Е–Њ—А–Њ—И–Њ –≤–Є–і–љ—Л —Б–Њ–ї–љ–µ—З–љ—Л–µ –±–∞—В–∞—А–µ–Є. –Т–љ–Є–Ј—Г: –њ—А–µ—В–µ–љ–і–µ–љ—В—Л –Є–Ј –Я–Њ—А—В—Г–≥–∞–ї–Є–Є –Є –Ъ–∞–љ–∞–і—Л (—Д–Њ—В–Њ —Б —Б–∞–є—В–Њ–≤ microtransat.org, roboticsailing.org –Є engsoc.queensu.ca).
—А–Њ–±–Њ—В Pinta —Д–∞–Ї—Г–ї—М—В–µ—В–∞ –Є–љ—Д–Њ—А–Љ–∞—В–Є–Ї–Є —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В–∞ –£—Н–ї—М—Б–∞ –≤ –Р–±–µ—А–Є—Б—В–≤–Є—В–µ (Aberystwyth University);
—Д—А–∞–љ—Ж—Г–Ј—Б–Ї–∞—П –≤—Л—Б—И–∞—П —И–Ї–Њ–ї–∞ –∞–≤–Є–∞—Ж–Є–Њ–љ–љ—Л—Е –Є–љ–ґ–µ–љ–µ—А–Њ–≤ (ENSICA) –Є –µ—С –Љ–∞—И–Є–љ–∞ IBoat;
–∞–≤—Б—В—А–Є–є—Б–Ї–Њ–µ –Њ–±—Й–µ—Б—В–≤–Њ –њ–µ—А–µ–і–Њ–≤—Л—Е –Ї–Њ–Љ–њ—М—О—В–µ—А–љ—Л—Е –Є—Б—Б–ї–µ–і–Њ–≤–∞–љ–Є–є (?sterreichische Gesellschaft f?r innovative Computerwissenschaften –Є–ї–Є INNOC) –Є –µ–≥–Њ –∞–њ–њ–∞—А–∞—В Roboat;
–Ї–Њ–Љ–∞–љ–і–∞ –∞–≤—В–Њ–љ–Њ–Љ–љ–Њ–≥–Њ –њ–∞—А—Г—Б–љ–Њ–≥–Њ —А–Њ–±–Њ—В–∞ (Mostly Autonomous Sailboat Team вАФ MAST) –Ъ–Њ—А–Њ–ї–µ–≤—Б–Ї–Њ–≥–Њ —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В–∞ –≤ –Ю–љ—В–∞—А–Є–Њ (Queen's University);
–ї–Њ–і–Ї–∞ FEUP Autonomous Sailboat (FASt) –Є–љ–ґ–µ–љ–µ—А–љ–Њ–≥–Њ —Д–∞–Ї—Г–ї—М—В–µ—В–∞ —Г–љ–Є–≤–µ—А—Б–Є—В–µ—В–∞ –Я–Њ—А—В–Њ (Faculdade de Engenharia da Universidade do Porto вАФ FEUP);
—З–∞—Б—В–љ–∞—П –Ї–Њ–Љ–∞–љ–і–∞ –Є–Ј –Ь—Н—А–Є–ї–µ–љ–і–∞ Team Robotboat –Є –µ—С –∞–њ–њ–∞—А–∞—В Mark III Robotboat;
—З–∞—Б—В–љ–∞—П –∞–Љ–µ—А–Є–Ї–∞–љ—Б–Ї–∞—П –Ї–Њ–Љ–∞–љ–і–∞ Team Savage;
—З–∞—Б—В–љ–∞—П –Ї–Њ–Љ–∞–љ–і–∞ Portencross Boys –Є–Ј –У–ї–∞–Ј–≥–Њ. –Ъ–∞—А—В–Є–љ–∞, –і–Њ—Б—В–Њ–є–љ–∞—П –њ–µ—А–∞ –Р–є–≤–∞–Ј–Њ–≤—Б–Ї–Њ–≥–Њ: –Ї–Њ—А–∞–±–ї–Є–Ї –Ї–Њ–Љ–∞–љ–і—Л MAST —Б—А–∞–ґ–∞–µ—В—Б—П —Б –њ–Њ—А—Л–≤–∞–Љ–Є –≤–µ—В—А–∞ –љ–∞ —Д–Њ–љ–µ —Б–≤–Є–љ—Ж–Њ–≤—Л—Е —В—Г—З (—Д–Њ—В–Њ —Б —Б–∞–є—В–∞ roboticsailing.org). –Я—А–Њ–µ–Ї—В –Є–Ј –Ь—Н—А–Є–ї–µ–љ–і–∞ (–Є–ї–ї—О—Б—В—А–∞—Ж–Є—П —Б —Б–∞–є—В–∞ robotboat.blogspot.com). –Я–Њ–Ї–∞ –Ї–Њ–Љ–∞–љ–і–∞ Team Savage –Ј–∞–≤–ї–µ–Ї–∞–µ—В –њ–Њ—В–µ–љ—Ж–Є–∞–ї—М–љ—Л—Е —Б–њ–Њ–љ—Б–Њ—А–Њ–≤ —Н—В–Є–Љ —А–Є—Б—Г–љ–Ї–Њ–ЉвА¶ (–Є–ї–ї—О—Б—В—А–∞—Ж–Є—П —Б —Б–∞–є—В–∞ tech.groups.yahoo.com).
—П—Е—В—Л –љ–µ –і–Њ–ї–ґ–љ—Л –Є–Љ–µ—В—М –љ–Є–Ї–∞–Ї–Њ–≥–Њ –њ—А–Є–≤–Њ–і–∞, –Ї—А–Њ–Љ–µ –њ–∞—А—Г—Б–∞;
–∞–њ–њ–∞—А–∞—В –і–Њ–ї–ґ–µ–љ –±—Л—В—М –њ–Њ–ї–љ–Њ—Б—В—М—О —Н–љ–µ—А–≥–µ—В–Є—З–µ—Б–Ї–Є –∞–≤—В–Њ–љ–Њ–Љ–љ—Л–Љ, –Њ–љ –і–Њ–ї–ґ–µ–љ –љ–µ—Б—В–Є –љ–∞ –±–Њ—А—В—Г –≤—Б—С –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–µ –µ–Љ—Г —Н–ї–µ–Ї—В—А–Њ–Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Є–µ, –∞ –≤ –і–ї–Є–љ—Г –њ–∞—А—Г—Б–љ–Є–Ї –љ–µ –і–Њ–ї–ґ–µ–љ –њ—А–µ–≤—Л—И–∞—В—М —З–µ—В—Л—А—С—Е –Љ–µ—В—А–Њ–≤;
—Г—З–∞—Б—В–љ–Є–Ї–Є –љ–µ –Љ–Њ–≥—Г—В –Љ–µ—И–∞—В—М –і—А—Г–≥–Є–Љ –њ—А–µ—В–µ–љ–і–µ–љ—В–∞–Љ, –≤ —В–Њ–Љ —З–Є—Б–ї–µ вАУ –≤–µ—Б—В–Є –Љ–∞—И–Є–љ—Л –љ–∞ —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–µ, —Б—В–∞–≤–Є—В—М –њ—А–µ–њ—П—В—Б—В–≤–Є—П –Є–ї–Є –Љ–µ—И–∞—В—М —А–∞–±–Њ—В–µ —Н–ї–µ–Ї—В—А–Њ–љ–љ—Л—Е —Б–Є—Б—В–µ–Љ –Ї–Њ–љ–Ї—Г—А–µ–љ—В–Њ–≤;
–Ї–∞–ґ–і—Л–є —Г—З–∞—Б—В–љ–Є–Ї –Њ–±—П–Ј—Г–µ—В—Б—П –њ—А–µ–і–Њ—Б—В–∞–≤–ї—П—В—М –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –ї–Њ–і–Ї–Є —Б—Г–і—М—П–Љ –љ–µ —А–µ–ґ–µ —А–∞–Ј–∞ –≤ —Б—Г—В–Ї–Є;
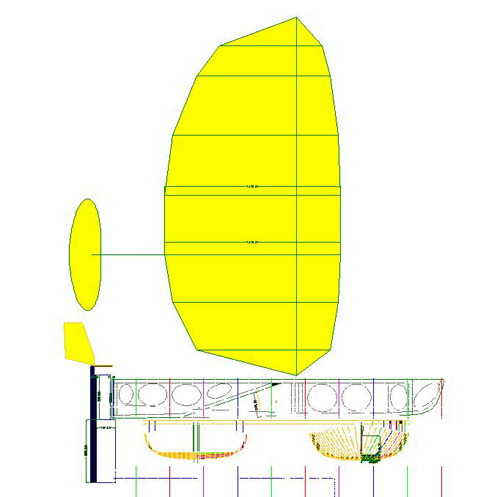
—Г—З–∞—Б—В–љ–Є–Ї–Є –љ–µ –Љ–Њ–≥—Г—В —Г–њ—А–∞–≤–ї—П—В—М —Б–≤–Њ–Є–Љ–Є —П—Е—В–∞–Љ–Є –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ, –љ–Њ –Љ–Њ–≥—Г—В –њ–µ—А–µ–њ—А–∞–≤–ї—П—В—М –љ–∞ –љ–Є—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В—Л –Њ–њ—А–µ–і–µ–ї—С–љ–љ—Л—Е —В–Њ—З–µ–Ї –і–Є—Б—В–∞–љ—Ж–Є–Є, –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О –Њ –њ–Њ–≥–Њ–і–µ –љ–∞ –Љ–∞—А—И—А—Г—В–µ –Є–ї–Є –і–∞–ґ–µ –Њ–±–љ–Њ–≤–ї—П—В—М –Я–Ю –ї–Њ–і–Ї–Є, –∞ —В–∞–Ї–ґ–µ вАУ –њ–Њ–ї—Г—З–∞—В—М —Б –±–Њ—А—В–∞ —В–µ–ї–µ–Љ–µ—В—А–Є—О –Њ —Б–Њ—Б—В–Њ—П–љ–Є–Є —П—Е—В—Л (–µ—С –±–∞—В–∞—А–µ–є –Є —В–∞–Ї –і–∞–ї–µ–µ). вА¶–Є—Е —Б–Њ–њ–µ—А–љ–Є–Ї–Є –Є–Ј Portencross Boys –≤—Л–њ–Њ–ї–љ–Є–ї–Є (–≤—З–µ—А–љ–µ) –њ—А–Њ–µ–Ї—В —Б–≤–Њ–µ–є —П—Е—В—Л-—А–Њ–±–Њ—В–∞ Shoogle Nifty II, —З–µ–Љ—Г —Б–≤–Є–і–µ—В–µ–ї—М—Б—В–≤–Њ вАФ —Н—В–Њ—В —З–µ—А—В—С–ґ (–Є–ї–ї—О—Б—В—А–∞—Ж–Є—П —Б —Б–∞–є—В–∞ vagabond.me.uk). –Э–µ—Б–Ї–Њ–ї—М–Ї–Њ –Љ–Њ–Љ–µ–љ—В–Њ–≤ –≥–Њ–љ–Ї–Є 2007-–≥–Њ, –Ї–Њ—В–Њ—А–∞—П –њ—А–Њ—И–ї–∞ –≤ –Ш—А–ї–∞–љ–і—Б–Ї–Њ–Љ –Љ–Њ—А–µ —Г –±–µ—А–µ–≥–∞ –Р–±–µ—А–Є—Б—В–≤–Є—В–∞ (—Д–Њ—В–Њ–≥—А–∞—Д–Є–Є —Б —Б–∞–є—В–∞ microtransat.org). membrana.ru
–У–ї–∞–≤–љ–Њ–µ –Ј–∞ –љ–µ–і–µ–ї—О








 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ