§ 72. Использование радио, радиопеленгования и радиолокации для предупреждения столкновений судов в море
А. Применение радио для предупреждения столкновений
Появление радио на судах привело к некоторому облегчению
в разрешении задач предупреждения столкновений судов в море. При помощи радио прежде всего стало возможным оповещение о месте, скорости и курсе судов. Из этих трех величин наименее достоверной величиной является место судна. Современные способы определения места судна в море еще не дают достаточной точности, чтобы использовать эту информацию
для маневрирования, чтобы избежать столкновения.
Рис. 128
Рис. 129
Однако даже эта информация полезна, так как заставляет
людей усилить бдительность и более строго выполнять Правила:
для предупреждения столкновений судов в море.
Применение радиопеленгатора. Радиопеленгатор
позволяет определить, идет ли наблюдаемое судно встречным
курсом или находится в стороне. Пеленг отсчитывается с достаточной степенью точности, особенно на близких расстояниях, однако курс и скорость наблюдаемого судна, а также расстояние
до него не могут быть определены даже приближенно.
Совместное применение радио и радиопеленгатора. Совместная работа радио и радиопеленгатора
позволяет определить относительное положение наблюдаемого
судна точнее, чем астрономическим и навигационным способами, так как в этом случае определяется положение одного суд-
на относительно другого. При таком определении обычно известны курсы и скорости обоих судов и два разновременные радиопеленга. Определение взаимного расположения судов по этим
данным не представляет затруднений.
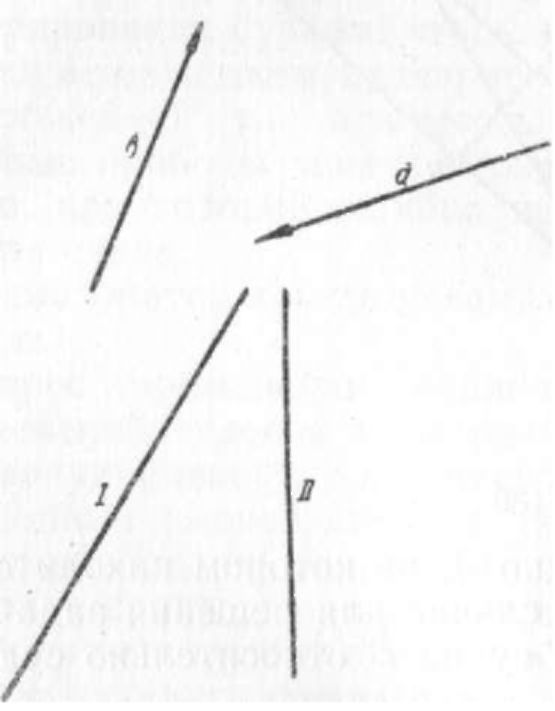
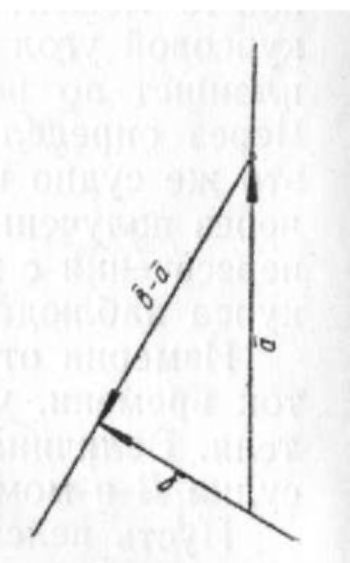
Предположим, что векторы а и b (рис. 128) представляют собой часовые скорости судов A и В, а направления I и II—пеленги, взятые через промежуток времени в один час. Требуется определить положение судов A и В относительно друг друга, в момент второго пеленга.
Рис. 130
Для этого условимся, что судно A, на котором находится наблюдатель, неподвижно. В этом случае для решения задачи необходимо найти вектор скорости судна В относительно судна A.
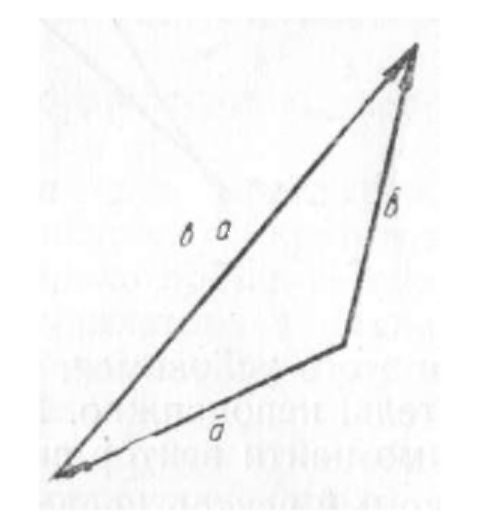
Искомый вектор представляет собой разность векторов b и а,
которая легко находится простым вычитанием этих векторов
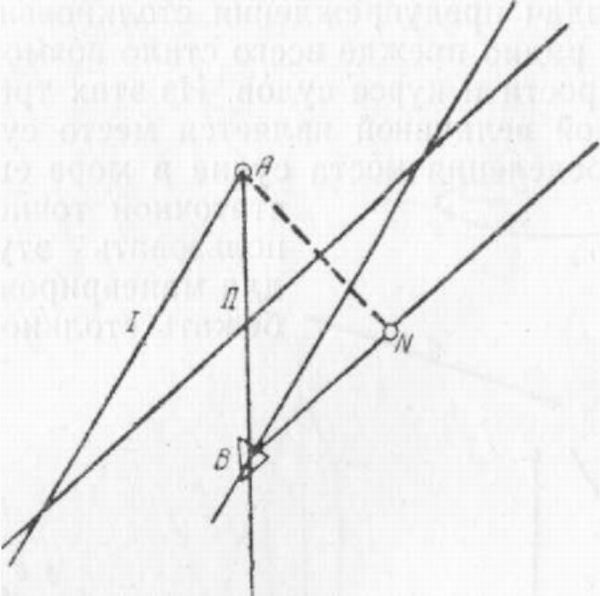
(рис. 129). Когда найден вектор b — а на листе бумаги наносят
точку и принимают ее за место судна Л. Дальнейшее построение
производится так, как при определении места способом крюйс-
пеленга. Необходимые для этого построения показаны на
рис. 130 и пояснений не требуют. Точка В представляет собой
место наблюдаемого судна в момент второго пеленга. Если через точку В провести направление вектора характеризующего
относительное движение судна В, и опустить перпендикуляр из
точки A на направление этого вектора, то будет получена точка N, в которой судно В будет находиться в момент наибольшего
сближения.
Положительной стороной совместного применения радио и
радиопеленгатора является то, что все указанные выше сведения
и -определения возможно получить даже при расположении судов
далеко за пределами видимости друг друга.
Недостаток современных радиоустановок на судах заключается в том, что при работе радиопеленгаторной установки, не
может работать приемо-передаточная станция, и наоборот. Таким образом, процесс взаимного пеленгования занимает длительное время, что вызывает необходимость начинать операции по
определению относительного расположения судов достаточно заблаговременно. Повторные определения также занимают длительное время. Подобные условия работы препятствуют широкому применению совместной работы радио и радиопеленгатора
при решении вопросов ППСС.
Применение радиолокатора. Радиолокатор позволяет еще больше облегчить решение вопросов, связанных с
предупреждением столкновений судов в море. Этот прибор позволяет определять углы с точностью до 1—2°, а расстояния с
точностью до 25—100 м(1). Точность определения как угла, так и
расстояния позволяет использовать их для установления метода
маневрирования судном, чтобы избежать столкновения. Для получения возможности маневрирования судами углы надо знать с
точностью 1—2°, т. е. с точностью, которую дают все морские угломерные приборы типа компаса; расстояния надо знать с точностью, при которой ошибка не превосходила бы наибольшего
размера судна.
Радиолокатор как по углам, так и по расстоянию дает такую
точность.
Вопрос применения радиолокатора для предупреждения
столкновений судов в море разберем, используя круговую или
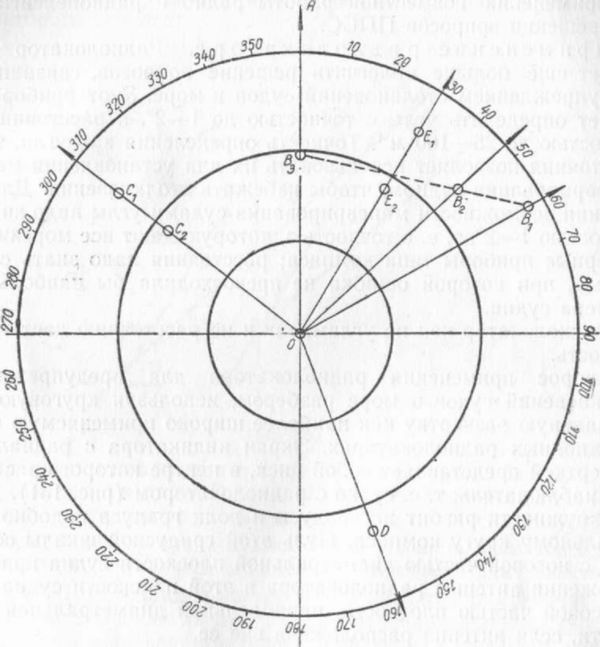
радиальную развертку как наиболее широко применяемую в навигационных радиолокаторах. Экран индикатора с радиальной
разверткой представляет собой диск, в центре которого расположен наблюдатель, т. е. судно с радиолокатором (рис. 131). Диск
по окружности разбит на градусы и доли градуса подобно азимутальному кругу компаса. Нуль этой градусной шкалы совпадает с носовой частью диаметральной плоскости судна при расположении антенны радиолокатора в этой плоскости судна, или
с носовой частью плоскости, параллельной диаметральной плоскости, если антенна расположена вне ее.
Все предметы, способные отражать электромагнитные волны,
получают изображение на экране индикатора. Курсовые углы
отсчитываются по градусной шкале, а расстояния определяются
при помощи концентрических кругов а, расположенных друг
от друга на определенных расстояниях.
На рис. 131 АО — носовая часть диаметральной плоскости
(или плоскости, параллельной ей). Экран представляет собой
полярную систему координат. Полюс в точке О, полярная ось
OA, полярный радиус — расстояние до предмета и полярный
угол — курсовой угол.
При работе с радиолокатором прежде всего необходимо поманить, что судно, на котором находится наблюдатель, неподвижно, а все окружающие предметы движутся относительно него.
Это обстоятельство с одной стороны удобно тем, что не требуется никаких дополнительных вычислений или построений, чтобы
решать интересующие задачи, но с другой стороны, может вводить в заблуждение при суждении о действительных скоростях
и направлениях на поверхности земли.
Рис. 131
При помощи радиолокатора можно определить:
1) расстояние, курсовой угол, а также относительные курс
и скорость наблюдаемого судна (относительная прокладка);
2) пересекаются ли курсы судна-наблюдателя и судна-наблюдаемого;
3) в какой точке относительно наблюдателя происходит пересечение курсов и через какой промежуток времени;
4) наименьшее расстояние между судами;
5) будет ли столкновение и через какой промежуток времени;
6) истинные курс и скорость наблюдаемого судна (истинная
прокладка);
7) курс, каким следует идти, чтобы пройти наблюдаемое судно в заданном расстоянии.
Решение поставленных задач может быть выполнено различными способами.
Начнем разбор этих способов с применения маневренного
планшета, который представляет собой точную копию экрана
с радиальной разверткой; поэтому можно воспользоваться
рис. 131.
Относительная прокладка. Допустим, что в какой-то момент времени мы обнаружили судно В. Определяем
курсовой угол и расстояние до него. Наносим на маневренный
планшет по полученным данным место судна В (точка В¹).
Через определенный промежуток времени вторично пеленгуем
это же судно и наносим его на планшет (точка В²). Проводим
через полученные таким образом точки прямую линию В¹В² до
пересечения с прямой OA. Точка В³ покажет место пересечения
курса наблюдателя судном В.
Измерив отрезком В¹В² расстояние В²Вз, получим промежуток времени, через который судно В пересечет курс наблюдателя. Величина ОВ² определяет расстояние от наблюдателя до
судна В в момент пересечения курса судна А.
Пусть пеленговали судно С, определили расстояние до него
и нанесли его место на маневренный планшет в точке С¹.
Через некоторое время, взяв второй пеленг судна С и опять
определив до него расстояние, получим, что пеленг не изменился,
а расстояние уменьшилось (точка С²). Положение второй точки
судна С показывает, что его относительный курс ведет в центр,
а следовательно, столкновение неизбежно и наступит оно через
промежуток времени, который легко определить, если отрезком
С¹С² измерить отрезок ОС².
Пусть далее запеленговали и определили расстояние до судна D. Через некоторый промежуток времени снова определили
и пеленг, и расстояние до этого судна. При этом оказалось, что
ни пеленг, ни расстояние не изменились. Такое обстоятельство
может быть лишь в том случае, когда судно D идет параллельным курсом с наблюдателем и имеет такую же скорость, как
и наблюдатель.
Когда в распоряжении судоводителя нет маневренного планшета, те же задачи могут быть решены методом пеленгов и расстояний. Для этого на отдельном листе бумаги (рис. 132) наносят точку О и проводят вертикальную прямую OA. Пусть
эта линия представляет собой носовую часть диаметральной
плоскости судна. Если на экране индикатора появилось какое-
либо судно В, то определив его курсовой угол и расстояние
до него, наносим на бумаге точку В¹ соответствующую этому
наблюдению. Через некоторый промежуток времени снова опре
деляем положение судна В (точка В²). Проведя прямую линию
через точки В¹ и В² до пересечения с прямой OA, получим точку В³, в которой судно В пересечет курс наблюдателя. Далее
нетрудно определить расстояние до этой точки. Кроме того, опустив перпендикуляр из точки О на прямую B¹B², определим
место судна В (точка N) в момент наибольшего сближения судов и величину этого сближения.
Истинная прокладка. Если необходимо знать действительные курс и скорость наблюдаемого судна, то нужно
сложить вектор скорости наблюдателя с вектором относительной скорости наблюдаемого судна.
Рис. 132
Рис. 133
Рис. 134
Определим действительную скорость и курс судна С, которое,
согласно наблюдениям на экране индикатора, идет курсом, ведущим к столкновению (см. рис. 131). Это судно располагается
слева под углом С¹ОА, т. е. около 53°. Предположим, что относительная часовая скорость этого судна будет выражаться отрезком 2 С¹С², курс наблюдателя 0°, а его скорость равна 2,5 С¹С²
Делаем построение, показанное на рис. 133. На этом рисунке вектор а — скорость движения судна-наблюдателя, вектор в—а — скорость относительного движения наблюдаемого суд.
на С и вектор в — скорость действительного движения судна С.
Курс этого судна около 51°, а его скорость примерно равна
2,1 С¹С² Выше разобран случай расхождения, когда по Правилу
19 судно С должно уступить дорогу судну-наблюдателю.
Разберем еще один случай, когда судно-наблюдатель согласно тому же Правилу должно уступить дорогу другому судну E
(см. рис. 131).
В момент обнаружения судна Е берем пеленг на это судно
и определяем расстояние до него. Нанеся на маневренный планшет первое положение судна Е, обозначаем его буквой Е¹. Через
некоторый промежуток времени берем второй пеленг и снова
определяем расстояние до судна Е. Пусть новое положение этого судна оказывается в точке Е² и его часовая скорость 2 E¹E²
На рис. 134 показано построение для определения истинного
курса и скорости судна Е. Из рисунка видно, что курс равен
303°, а скорость — около 0,6 E¹E².
Рис. 135
Определение курса, каким следует править,
чтобы пройти наблюдаемое судно в заданном
расстоянии (рис 135). Предположим, что курс судна-наблюдателя равен 0°, А²В¹ — вектор скорости судна-наблюдателя, r—
расстояние, в котором желают пройти наблюдаемое судно,
В¹В² — вектор относительной скорости наблюдаемого судна
до изменения вектора скорости судна-наблюдателя, t — промежуток времени, через который берутся пеленги (принимаем его
постоянным для всей задачи). Наблюдаемое судно движется,
не меняя ни курса, ни скорости своего движения. Определим:
1) курс и скорость судна-наблюдателя для расхождения с
наблюдаемым судном в расстоянии r;
2) относительные курс и скорость наблюдаемого судна при
подобном маневрировании судна-наблюдателя.
Все построение выполняем на маневренном планшете для
относительной прокладки. Центр планшета обозначаем буквой
А¹. Из этого центра радиусом, равным расстоянию r, описываем окружность.
Определяем вектор относительной скорости наблюдаемого
судна. Для этого пеленгуем в какой-то момент эхо-сигнал наблюдаемого судна, наносим место этого судна на планшет и обозначаем полученную точку буквой В¹. Через промежуток времени, равный t, производим второе наблюдение; полученную точку
обозначаем буквой В². Вектор В¹В² и будет искомым вектором
относительной скорости наблюдаемого судна В.
Определяем вектор скорости истинного движения наблюдаемого судна В. Для этого складываем вектор В¹В² с вектором
A²B¹. Сумма этих векторов и даст искомый вектор А²В² истинного движения наблюдаемого судна.
Находим курс и скорость судна-наблюдателя для расхождения с наблюдаемым судном в заданном расстоянии r (поворот
предполагается произвести через время t после второго наблюдения). Наносим положение наблюдаемого судна В в момент
поворота судна-наблюдателя А. Для этого на линии В¹В² откладываем в направлении движения судна В отрезок, равный В¹В².
Получаем, таким образом, точку В³, через которую проводим касательную к окружности, описанной около точки А¹ радиусом,
равным расстоянию r. Точку касания обозначим Т¹. Далее в точке B³ строим вектор истинной скорости A³В³ наблюдаемого судна В. В этой стадии построения известны: вектор истинной скорости наблюдаемого судна и линия относительного его пути В³Т¹.
По этим двум известным величинам надо определить вектор
скорости судна-наблюдателя A, а также направление и величину вектора относительной скорости наблюдаемого судна В на
новом курсе судна А.
В общем случае для осуществления расхождения судов в заданном расстоянии для судна-наблюдателя необходимо: 1) изменить только свой курс, 2) изменить только свою скорость и
3) одновременно изменить свой курс и свою скорость.
Решим нашу задачу в предположении изменения только
курса: скорость остается прежней.
Из точки A³ начала вектора истинной скорости наблюдаемого
судна радиусом, равным скорости судна-наблюдателя, описываем окружность, которая пересечет линию В Т³ в точках К'¹ и К".
Соединяем эти точки с точкой A³. Векторы А³К' и А³К" будут
представлять собой возможные курсы судна-наблюдателя, на которых суда разойдутся в заданном расстоянии.
Для выяснения относительного движения судов следует найти
вектор относительной скорости наблюдаемого судна Для этой
цели из вектора истинной скорости наблюдаемого судна надо вычесть вектор скорости судна-наблюдателя.
Если судно-наблюдатель ляжет на курс А³К', то вектор относительной скорости наблюдаемого судна будет К'В³ а если судно-наблюдатель ляжет на курс А³К'' то ректор относительной
скорости наблюдаемого судна будет К"В³. В первом случае
судно-наблюдатель будет обгонять наблюдаемое судно идя расходящимся курсом. Во втором случае судно-наблюдатель пойдет
под корму наблюдаемого судна и процесс расхождения судов
будет соответствовать правильному маневрированию при расхождении судов друг с другом. Очевидно, второй поворот лучше
Рис. 136
Решим эту же задачу изменением только скорости судна-наблюдателя: курс остается прежним.
Через точку A³ проводим линию, параллельную курсу судна-
наблюдателя. Отметим точку пересечения этого курса с линией
Т¹В³, которую обозначим буквой K"'. Вектор АК!" будет той
скоростью, с которой должно идти судно-наблюдатель, чтобы
разойтись с судном В в заданном расстоянии r, не меняя курса.
Вектор относительной скорости наблюдаемого судна будет K'B³.
Решим задачу, предполагая изменить и курс, и скорость
судна-наблюдателя.
Все курсы между точками К' и К" а также между точками
К" и К'" будут требовать одновременно и изменения скорости,
т. е. будут соответствовать поставленной задаче маневрирования
судна-наблюдателя с изменением курса и скорости.
После поворота или изменения скорости или того и другого
вместе судно-наблюдатель должно сразу же начать относительную прокладку, чтобы проверить: а) свои расчеты и б) не изменило ли наблюдаемое судно характер своего движения.
Кроме этих методов решения поставленных задач, можно
воспользоваться формулами аналитической геометрии, используя
систему полярных координат.
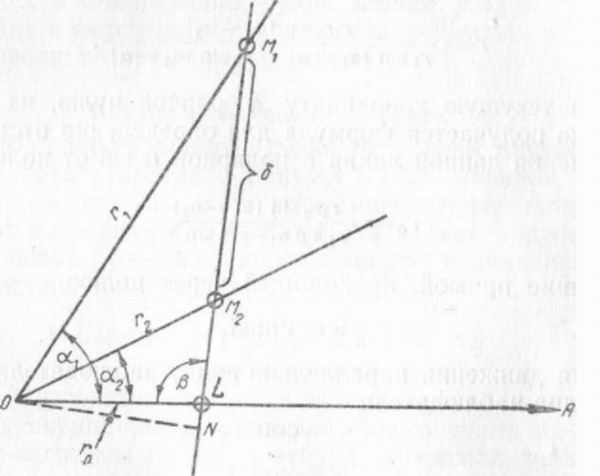
Предположим, что па рис. 136 точка О —полюс, линия АО —
полярная ось, r¹— полярный радиус и а¹ — полярный угол.
Расстояние между точками М¹ и М² = 8 может быть вычислено по формуле
Уравнение прямой, проходящей через точки М¹ и М², будет
Приняв текущую координату а равной нулю, из формулы
(119) легко получается формула для определения отстояния точки пересечения данной линии с полярной осью от полюса О
Уравнение прямой, проходящей через полюс,
Условия движения параллельно судну-наблюдателю и со скоростью судна-наблюдателя
Угол между данной прямой и полярной осью, обозначенный
буквой в, может быть определен из треугольника OМ¹L по двум
сторонам и углу между ними.
Когда угол в определен, легко определяется и длина перпендикуляра из полюса на данную прямую (линия ON).
Некоторые свойства современных радиолокаторов,
влияющие на его применение для целей предупреждения
столкновений судов в море
Дальность действия
и обнаружения плавучих средств
Радиус действия современных судовых радиолокационных
станций обычно охватывает зону 30—50 миль.
Мертвая зона 30—120 м.
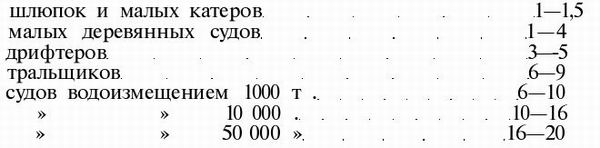
Нормальная дальность обнаружения плавучих средств
(в милях):
При волнении 4 балла мелкие рыболовные суда различаются
с трудом; при волнении 6 баллов исчезают эхо-сигналы морских
тральщиков и судов прибрежного плавания средних размеров;
когда волнение 8 баллов на всем диапазоне расстояния обнаруживаются только крупные океанские суда с развитыми надстройками.
На дальность обнаружения судов влияют ракурс судна (положение судна в перспективе), его осадка и условия распространения радиоволн во время наблюдения.
Ракурс наблюдаемого судна
Эхо-сигнал наблюдаемого судна ни в коем случае не дает
правильного представления о ракурсе (перспективном положении) наблюдаемого судна, хотя такое впечатление иногда и создается при наблюдении эхо-сигналов на экране радиолокатора.
Для установления ракурса наблюдаемого судна необходимо
произвести истинную прокладку.
Помехи от других судов
Если эхо-сигнал настолько силен, что может отразиться от
судна, пославшего этот сигнал, и снова отразиться от второго
судна, то на экране радиолокатора первого судна за действительным эхо-сигналом появится второй эхо-сигнал, расположенный от центра экрана в два раза дальше, чем первый сигнал.
Если таких отражений между судами будет несколько, то на
экране возникает серия эхо-сигналов, расположенных на пеленге наблюдаемого судна на одинаковых расстояниях друг от друга. Действительным эхо-сигналом будет самый ближний к центру экрана.
Это явление имеет место в том случае, когда оба судна находятся на траверзе друг у друга, так как в этот момент отражающие поверхности обоих судов будут наибольшими.
Общие соображения по использованию радиолокационной станции
при расхождении судов
1. Недооценка и переоценка роли радиолокатора одинаково
опасны при расхождении со встречными судами в условиях плохой видимости.
2. Судоводитель, не использующий возможностей радиолокатора как радиодальномера и угломера и ограничивающийся
только просмотром обстановки на экране, допускает грубую
ошибку
3. Судоводитель, считающий, что радиолокатор способен обнаружить абсолютно все объекты в окружении судна при любых
гидрометеорологических условиях, допускает опасную переоценку возможностей прибора.
4. При плавании в условиях плохой видимости судоводитель
имеет возможность достаточно точно определить расстояние до
обнаруженных на экране судов и их пеленги. Следовательно, он
имеет необходимые данные для своевременного маневрирования
во избежание опасного сближения.
1. Отсутствие предварительного методического радиолокационного наблюдения.
2. Отсутствие определения или неправильные наблюдения
элементов движения судов по их эхо-сигналам.
3. Неправильное регулирование радиолокатора или его неполноценное действие, являющиеся причиной того, что эхо-сигналы судов не обнаруживаются или обнаруживаются поздно (на
малом расстоянии).
4. Чрезмерная скорость плавания в плохую видимость, которая допускается при переоценке роли радиолокатора.
5. Слишком поздно предпринятый маневр для расхождения
со встречным судном.
6. Необоснованное маневрирование и подача эволюционных
сигналов вне визуальной видимости,
7. Нарушение требования Правил для предупреждения столкновений судов в море в части установленных туманных сигналов.
8. Отождествление наблюдений на экране радиолокатора с
визуальной видимостью.
9. Излишнее доверие к работе радиолокатора, не учитывающее, что технические несовершенства станции, неправильная
эксплуатация ее, влияние гидрометеорологических факторов
(атмосферные осадки, зыбь и др.), слабая отражательная способность небольших, особенно деревянных судов,— могут дать
слишком слабые эхо-сигналы или совсем не дать их.
10. Отсутствие учета того, что судно, не имеющее радиолокатора, будет действовать в соответствии с Правилами для предупреждения столкновений судов в море, ожидая того же от
всех судов.
Действия судоводителя при снижении видимости
1. При уменьшении дальности видимости вследствие тумана,
мглы, снегопада или сильного ливня и т. д. вахтенный штурман
обязан предупредить капитана, включить радиолокатор и начать
наблюдение по шкале дальности, превышающей наблюдаемую
дальность видимости.
2. При внезапном ухудшении видимости надлежит немедленно уменьшить скорость движения, включить радиолокатор и начать наблюдение на 5-мильной шкале, чтобы убедиться в отсутствии близкой опасности. Затем переключить на 15-мильную
шкалу. В дальнейшем наблюдения ведутся попеременно на каждой из этих шкал. Для обнаружения мелких судов на близком
расстоянии необходимо периодически производить просмотр на
1,5-мильной шкале дальности. В настоящее время для наблюдения в открытом море следует считать лучшей 15-мильную
шкалу дальности.
3. При обнаружении на экране радиолокатора эхо-сигнала
другого судна наблюдение за ним нужно вести до полного расхождения судов.
4. Места всех обнаруженных на экране радиолокатора судов
следует немедленно нанести на планшет, карту или лист бумаги
с указанием времени определения и отсчетом судового лага в
этот момент. При этом нужно сделать соответствующую запись в
черновом вахтенном журнале.
5. Моменты включения и выключения радиолокатора необходимо записать в черновом вахтенном журнале.
6. На дальних дистанциях наблюдение за экраном радиолокатора и прокладку движения наблюдаемого судна следует вести
одному и тому же лицу (капитану или вахтенному штурману).
В этом случае вероятность ошибки в прокладке и оценке обстановки будет минимальная.
На близких дистанциях капитан должен сосредоточить свое
внимание на управлении судном. На обязанности вахтенного
щтурмана лежат ведение наблюдения за экраном радиолокатора,
производство необходимых расчетов и передача полученных сведений капитану.
7. Когда на экране радиолокатора наблюдаются эхо-сигналы
нескольких судов и создается обстановка, требующая непрерывного наблюдения за экраном, необходимо привлекать дополнительного наблюдателя. В этих условиях капитан осуществляет
управление судном, а вахтенный штурман ведет маневренную
прокладку, используя данные, сообщаемые наблюдателем у экрана. Периодически и капитан, и вахтенный штурман должны
просматривать экран для уяснения характера изменения изображений и контролирования работы наблюдателя.
Рекомендации по уклонению от столкновения с другим судном
в плохую видимость при использовании судовой
радиолокационной установки
1. В прибрежных районах и на подходах к портам, проливам
и бухтам существует вероятность встречи с судами любых размеров, включая малые и гребные. Все эти суда могут следо)вать
разными курсами к пунктам побережья и от них. Кроме того,
в этом случае возможна также встреча с судами, занятыми рыбной ловлей и другими работами, ограничивающими их маневренность. В поле зрения радиолокатора могут одновременно наблюдаться эхо-сигналы и судов, и знаков плавучей обстановки. В
таких условиях очень трудно расходиться с судами. Поэтому
единственным средством избежать столкновения являются уменьшение скорости движения до минимума и своевременная остановка своего судна.
2. Плавание в открытом море может быть разделено на два
вида: а) плавание на путях, часто посещаемых другими судами,
б) плавание в районах, редко посещаемых судами.
Плавание в районах, часто посещаемых другими судами, будет
мало отличаться от плавания в прибрежной зоне. Следовательно, методом предупреждения столкновения будут также уменьшение скорости движения и своевременная остановка своего судна.
Плавание в районах с незначительным движением судов, особенно там, где маловероятна встреча с небольшими судами,
капитан судна, оборудованного радиолокатором, имеет возможность уклониться от опасного сближения с другим судном не
только уменьшением скорости или остановкой своего судна, но»
также и изменением курса.
3. Изменение курса своего судна может быть сделано только
тогда, когда определены истинные курс и скорость наблюдаемого судна, а также обстоятельства встречи (момент пересечения
курсов и наименьшее расстояние между судами).
4. Независимо от того, оборудовано ли судно радиолокатором
или нет, оно должно остановиться, услышав туманный сигнал
другого судна. Именно остановиться, так как прекращение движения судна-наблюдателя превращает движение наблюдаемого
судна из относительного в истинное, облегчая тем самым решение вопроса о характере движения наблюдаемого судна.
5. Ведение прокладки движения всех обнаруженных судовым
радиолокатором судов обязательно. Если на экране радиолокатора появляются эхо-сигналы нескольких судов, то в первую
очередь должно быть определено движение тех судов, эхо-сигнал
которых ближе к центру экрана.
6. Если впереди траверза появилось большое количество эхо-
сигналов от объектов на воде, следует принять особые меры:
остановить движение, если эхо-сигналы находятся не далее 2—3
миль от центра экрана, или максимально снизить скорость, если
эхо-сигналы находятся в большем удалении. Вообще говоря, и в
последнем случае также следует остановиться, так как остановка
значительно облегчается определением элементов движения наблюдаемых судов. Продолжать движение следует лишь после выя-
снения обстановки.
7. Для уменьшения влияния рысканья судна на курсе лучше
брать пеленги наблюдаемого судна, а не курсовые углы, так как
пеленг будет связан с меридианом, а не с диаметральной плоскостью, положение которой в пространстве может быть непостоянным.
8. Следует помнить, что наличие радиолокатора дает судоводителю возможность видеть обстановку и заранее принимать меры, но не дает права нарушать Правила для предупреждения
столкновений судов в море и Устав службы на судах морского
флота СССР.
Радиолокатор с истинным движением
Применение радиолокатора с истинным движением значитель-
но упрощает всю работу по определению элементов движения
наблюдаемого судна, так как в этом случае нет необходимости
вести две прокладки, и следовательно, будет только одна прокладка—истинная. Кроме того, при применении этого радиолокатора можно сразу видеть ракурс наблюдаемого судна.
Радиолокатор и Правила для предупреждения
столкновений судов в море
Радиолокатор существенно облегчает разрешение задачи о
маневрировании судном для предотвращения столкновения. В
случае расхождения с несколькими судами задача может быть
правильно решена только при помощи радиолокатора или оптического дальномера. В связи с этим возникает вопрос о
пересмотре Правил для предупреждения столкновений судов
в море для того, чтобы отразить в них использование радиолокатора.
Однако, почему же текст Правил для предупреждения столкновений судов в море, пересмотренный в 1948 г., не отразил в
себе положительных свойств радиолокатора, хотя радиолокационная техника к этому времени была достаточно развита?
Причины этого заключаются в следующем.
1. Радиолокатор не различает парусное наблюдаемое судно
или же это судно с механическим двигателем; занимается ли
наблюдаемое судно буксировкой другого судна или нет; может
ли оно свободно управляться или нет и т. д.
2. Не все суда снабжены радиолокаторами.
3. Не все суда одинаково изображаются на экране радиолокатора, а некоторые и совсем не дают эхо-сигнала.
4. Сам прибор не достиг еще требуемой простоты и надежности действия.
5. Имеются помехи, которые иногда препятствуют нормальной работе радиолокатора.
6. Наличие мертвого пространства, которое не просматривается радиолокатором и величина которого зависит от типа прибора
и от способа установки его на судне.









 Важное
Важное

 Важное
Важное
.jpg) Важное
Важное
 Важное
Важное