–С–∞–љ–љ–µ—А

–Э–Њ–≤—Л–µ —А–µ—И–µ–љ–Є—П –і–ї—П –Ј–∞—А—П–і–Ї–Є –≥–Њ—А–Њ–і—Б–Ї–Њ–≥–Њ —Н–ї–µ–Ї—В—А–Њ—В—А–∞–љ—Б–њ–Њ—А—В–∞
|
1.2. –Ю–°–Э–Ю–Т–Ђ –Ш–°–Я–Ю–Ы–ђ–Ч–Ю–Т–Р–Э–Ш–ѓ –†–£–Ы–ѓ
–Ю–±–µ—Б–њ–µ—З–µ–љ–Є–µ –њ–Њ–≤–Њ—А–Њ—В–ї–Є–≤–Њ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –і–Њ—Б—В–Є–≥–∞–µ—В—Б—П –Є—Б¬≠–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ–Љ —Б—А–µ–і—Б—В–≤ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Є –і–≤–Є–ґ–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П. –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є–Є –Є —Е–∞—А–∞–Ї—В–µ—А–∞ –Є—Е –Є—Б–њ–Њ–ї—М–Ј–Њ¬≠–≤–∞–љ–Є—П —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ–Њ–і—А–∞–Ј–і–µ–ї—П—О—В—Б—П –љ–∞ –≥–ї–∞–≤–љ—Л–µ (–У–°–£) –Є –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–µ (–Т–°–£). –Ф–µ–є—Б—В–≤–Є–µ –У–°–£ –Ј–∞–≤–Є—Б–Є—В –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є —Е–Њ–і–∞ –Ї–Њ—А–∞–±–ї—П –Є–ї–Є –Њ—В —Е–∞—А–∞–Ї—В–µ—А–∞ —А–∞–±–Њ—В—Л –і–≤–Є¬≠–ґ–Є—В–µ–ї–µ–є. –Ъ –≥–ї–∞–≤–љ—Л–Љ —Б—А–µ–і—Б—В–≤–∞–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—В–љ–Њ—Б—П—В—Б—П —А—Г–ї–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —В–Є–њ–Њ–≤ –Є –њ–Њ–≤–Њ—А–Њ—В–љ—Л–µ –љ–∞—Б–∞–і–Ї–Є(1).
–Т—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—А–µ–і—Б—В–∞–≤–ї—П—О—В —Б–Њ¬≠–±–Њ–є –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ-—А—Г–ї–µ–≤—Л–µ –Ї–Њ–Љ–њ–ї–µ–Ї—Б—Л, –і–µ–є—Б—В–≤–Є–µ –Ї–Њ—В–Њ—А—Л—Е –љ–µ —Б–≤—П–Ј–∞–љ–Њ —Б —А–∞–±–Њ—В–Њ–є –≥–ї–∞–≤–љ—Л—Е –і–≤–Є–≥–∞—В–µ–ї–µ–є –Ї–Њ—А–∞–±–ї—П. –Ъ –≤—Б–њ–Њ¬≠–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–Љ —Б—А–µ–і—Б—В–≤–∞–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—В–љ–Њ—Б—П—В—Б—П –њ–Њ–і—А—Г–ї–Є¬≠–≤–∞—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ (–Я–£), –∞–Ї—В–Є–≤–љ—Л–µ —А—Г–ї–Є (–Р–†), –≤—Л–і–≤–Є–ґ¬≠–љ—Л–µ –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ-—А—Г–ї–µ–≤—Л–µ –Ї–Њ–ї–Њ–љ–Ї–Є (–Т–Ф–†–Ъ) –Є –њ–Њ–≤–Њ—А–Њ—В¬≠–љ—Л–µ –Ї–Њ–ї–Њ–љ–Ї–Є (–Я–Ъ). –Т –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е –љ–∞ –љ–µ–Ї–Њ¬≠—В–Њ—А—Л—Е –њ—А–Њ–µ–Ї—В–∞—Е –Ї–Њ—А–∞–±–ї–µ–є –Є –њ–Њ–і–≤–Њ–і–љ—Л—Е –ї–Њ–і–Њ–Ї –≤—Б–њ–Њ–Љ–Њ–≥–∞¬≠—В–µ–ї—М–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Љ–Њ–≥—Г—В –±—Л—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ—Л –Є –Ї–∞–Ї –Њ—Б–љ–Њ–≤–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ –і–≤–Є–ґ–µ–љ–Є—П.
–У–ї–∞–≤–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –†—Г–ї–Є –Є –Є—Е –≥–µ–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Є–µ —Е–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є
–Ъ–Њ—А–∞–±–µ–ї—М–љ—Л–є —А—Г–ї—М –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –Ї—А—Л–ї–Њ —Б–Є–Љ–Љ–µ¬≠—В—А–Є—З–љ–Њ–≥–Њ –њ—А–Њ—Д–Є–ї—П. –Я–Њ —Б–њ–Њ—Б–Њ–±—Г —Б–Њ–µ–і–Є–љ–µ–љ–Є—П –њ–µ—А–∞ —А—Г–ї—П —Б –Ї–Њ—А–њ—Г—Б–Њ–Љ –Ї–Њ—А–∞–±–ї—П —А—Г–ї–Є –±—Л–≤–∞—О—В –њ—А–Њ—Б—В—Л–µ, –њ–Њ–ї—Г–њ–Њ–і–≤–µ—Б–љ—Л–µ –Є –њ–Њ–і–≤–µ—Б–љ—Л–µ, –њ–Њ –њ–Њ–ї–Њ–ґ–µ–љ–Є—О –Њ—Б–Є –±–∞–ї–ї–µ—А–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –њ–µ—А–∞ —А—Г–ї—П вАФ –љ–µ–±–∞–ї–∞–љ—Б–Є—А–љ—Л–µ –Є –±–∞–ї–∞–љ—Б–Є—А–љ—Л–µ(2) (—А–Є—Б. 1.1). –Э–∞ –Ї–Њ—А–∞–±–ї—П—Е —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В—Б—П —В–Њ–ї—М–Ї–Њ –±–∞–ї–∞–љ—Б–Є—А–љ—Л–µ –Є–ї–Є –њ–Њ–ї—Г–±–∞–ї–∞–љ—Б–Є—А–љ—Л–µ —А—Г–ї–Є. –Ю—В–љ–Њ—И–µ–љ–Є–µ –њ–ї–Њ—Й–∞–і–Є –±–∞–ї–∞–љ—Б–Є—А–љ–Њ–є —З–∞—Б—В–Є —А—Г–ї—П –Ї –Њ—Б—В–∞–ї—М–љ–Њ–є –љ–∞–Ј—Л–≤–∞–µ—В—Б—П –Ї–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В–Њ–Љ –Ї–Њ–Љ–њ–µ–љ—Б–∞—Ж–Є–Є —А—Г–ї—П. –Ю–±—Л—З–љ–Њ –Њ–љ –Ї–Њ–ї–µ–±–ї–µ—В—Б—П –≤ –њ—А–µ–і–µ¬≠–ї–∞—Е –Њ—В 0,2 –і–Њ 0,3. –Э–∞–Є–±–Њ–ї–µ–µ –≤–∞–ґ–љ—Л–µ –≥–µ–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Є–µ —Е–∞¬≠—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —А—Г–ї—П: –µ–≥–Њ –њ–ї–Њ—Й–∞–і—М Sp, –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–µ —Г–і–ї–Є¬≠–љ–µ–љ–Є–µ λ—А, —Д–Њ—А–Љ–∞ –Є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–∞—П —В–Њ–ї—Й–Є–љ–∞ –њ—А–Њ—Д–Є–ї—П –њ–Њ¬≠–њ–µ—А–µ—З–љ–Њ–≥–Њ —Б–µ—З–µ–љ–Є—П Δ—А.
–Я–ї–Њ—Й–∞–і—М –њ–µ—А–∞ —А—Г–ї—П Sp —Б–Њ—Б—В–∞–≤–ї—П–µ—В –≤ —Б—А–µ–і–љ–µ–Љ –Њ–Ї–Њ–ї–Њ 2% –њ–Њ–≥—А—Г–ґ–µ–љ–љ–Њ–є –њ–ї–Њ—Й–∞–і–Є –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є (LxT).
–Ю—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–µ —Г–і–ї–Є–љ–µ–љ–Є–µ λ—А = h²p/Sp, –≥–і–µ hp вАФ –≤—Л—Б–Њ—В–∞ –њ–µ—А–∞ —А—Г–ї—П, –Њ–±—Л—З–љ–Њ –Ї–Њ–ї–µ–±–ї–µ—В—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е –Њ—В 0,4 –і–Њ 2,5.
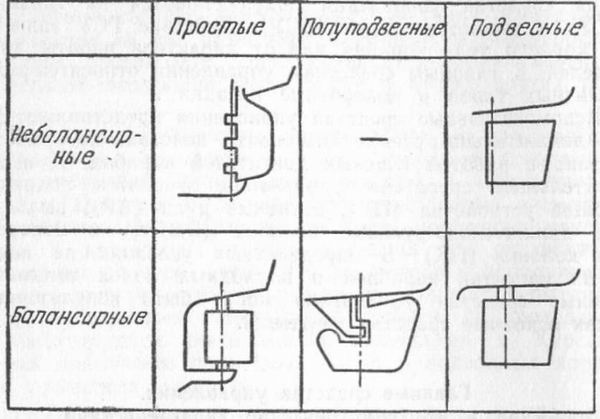
–†–Є—Б. 1.1. –Ъ–ї–∞—Б—Б–Є—Д–Є–Ї–∞—Ж–Є—П —А—Г–ї–µ–є
–Ю—В–љ–Њ—Б–Є—В–µ–ї—М–љ–∞—П —В–Њ–ї—Й–Є–љ–∞ –њ—А–Њ—Д–Є–ї—П –њ–Њ–њ–µ—А–µ—З–љ–Њ–≥–Њ —Б–µ—З–µ–љ–Є—П —А—Г–ї—П Δ—А = lp/b—А, –≥–і–µ l—АвАФ –љ–∞–Є–±–Њ–ї—М—И–∞—П —В–Њ–ї—Й–Є–љ–∞ –њ—А–Њ—Д–Є–ї—П, –∞ bp вАФ —Б—А–µ–і–љ—П—П —И–Є—А–Є–љ–∞ —А—Г–ї—П, –Њ–±—Л—З–љ–Њ —А–∞–≤–љ–∞ 0,15вАФ0,18.
–Т—Л—Б–Њ—В–∞ (—А–∞–Ј–Љ–∞—Е) —А—Г–ї—П hp –Њ–±—Л—З–љ–Њ –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П —Г—Б–ї–Њ¬≠–≤–Є—П–Љ–Є –µ–≥–Њ —А–∞–Ј–Љ–µ—Й–µ–љ–Є—П –≤ –Ї–Њ—А–Љ–Њ–≤–Њ–Љ –њ–Њ–і–Ј–Њ—А–µ.
–Э–∞ –Њ–і–љ–Њ–≤–Є–љ—В–Њ–≤—Л—Е –Ї–Њ—А–∞–±–ї—П—Е —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –Њ–і–Є–љ —А—Г–ї—М, –Ї–Њ—В–Њ—А—Л–є —А–∞–Ј–Љ–µ—Й–∞–µ—В—Б—П –Ј–∞ –≤–Є–љ—В–Њ–Љ.
–Ф–≤—Г—Е–≤–Є–љ—В–Њ–≤—Л–µ –Є —В—А–µ—Е–≤–Є–љ—В–Њ–≤—Л–µ –Ї–Њ—А–∞–±–ї–Є –Љ–Њ–≥—Г—В –Є–Љ–µ—В—М –Њ–і–Є–љ –Є–ї–Є –і–≤–∞ —А—Г–ї—П. –Т –њ–µ—А–≤–Њ–Љ —Б–ї—Г—З–∞–µ —А—Г–ї—М —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В—Б—П –≤ –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є (–Ф–Я), –∞ –≤–Њ –≤—В–Њ—А–Њ–Љ вАФ —Б–Є–Љ–Љ–µ¬≠—В—А–Є—З–љ–Њ –Ј–∞ –±–Њ—А—В–Њ–≤—Л–Љ–Є –≤–Є–љ—В–∞–Љ–Є.
–Я–Њ–ї–Њ–ґ–µ–љ–Є–µ —А—Г–ї—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –љ–∞–±–µ–≥–∞—О—Й–µ–≥–Њ –љ–∞ –љ–µ–≥–Њ –њ–Њ¬≠—В–Њ–Ї–∞ —Е–∞—А–∞–Ї—В–µ—А–Є–Ј—Г–µ—В—Б—П —Г–≥–ї–Њ–Љ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П –∞—А –Є —Г–≥–ї–Њ–Љ –∞—В–∞–Ї–Є –∞.
–£–≥–ї–Њ–Љ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П –∞—А –љ–∞–Ј—Л–≤–∞–µ—В—Б—П —Г–≥–Њ–ї –њ–Њ–≤–Њ—А–Њ—В–∞ —А—Г–ї—П, –Є–Ј–Љ–µ—А–µ–љ–љ—Л–є –≤ –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А–љ–Њ–є –Ї –Њ—Б–Є –±–∞–ї–ї–µ—А–∞. –∞—А –Љ–Њ—А—Б–Ї–Є—Е —Б—Г–і–Њ–≤ –Њ–±—Л—З–љ–Њ –Њ–≥—А–∞–љ–Є—З–Є–≤–∞–µ—В—Б—П 35¬∞ –£–≥–ї–Њ–Љ –∞—В–∞–Ї–Є —А—Г–ї—П –∞ –љ–∞–Ј—Л–≤–∞–µ—В—Б—П —Г–≥–Њ–ї, –Њ–±—А–∞–Ј–Њ¬≠–≤–∞–љ–љ—Л–є –њ–ї–Њ—Б–Ї–Њ—Б—В—М—О —Б–Є–Љ–Љ–µ—В—А–Є–Є —А—Г–ї—П –Є –њ–ї–Њ—Б–Ї–Њ—Б—В—М—О, –њ—А–Њ—Е–Њ¬≠–і—П—Й–µ–є —З–µ—А–µ–Ј –Њ—Б—М –±–∞–ї–ї–µ—А–∞ –Є —Б–Њ–≤–њ–∞–і–∞—О—Й–µ–є —Б –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ–Љ –љ–∞–±–µ–≥–∞—О—Й–µ–≥–Њ –њ–Њ—В–Њ–Ї–∞.
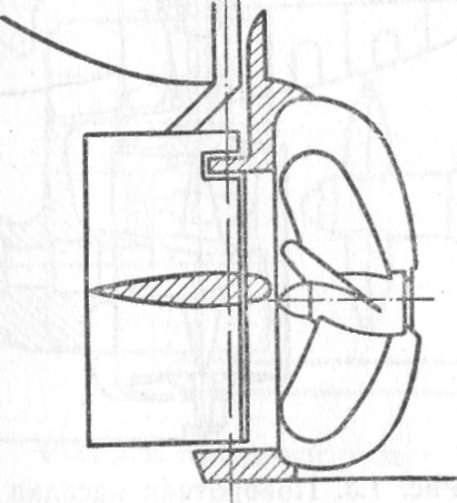
–†–Є—Б. 1.2. –Я—А–Њ–њ—Г–ї—М—Б–Є–≤–љ–∞—П –љ–∞–і–µ–ї–Ї–∞ –љ–∞ —А—Г–ї–µ
–Ф–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П –њ—А–Њ–њ—Г–ї—М—Б–Є–≤–љ–Њ–≥–Њ –Ї. –њ. –і. –≥—А–µ–±–љ–Њ–≥–Њ –≤–Є–љ—В–∞ –љ–∞ —А—Г–ї—П—Е –Є–љ–Њ–≥–і–∞ —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –њ—А–Њ–њ—Г–ї—М—Б–Є–≤–љ—Л–µ (–≥—А—Г—И–µ¬≠–≤–Є–і–љ—Л–µ) –љ–∞–і–µ–ї–Ї–Є (—А–Є—Б. 1.2). –Я–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ—Л–є —Н—Д—Д–µ–Ї—В –њ—А–Њ–њ—Г–ї—М—Б–Є–≤–љ—Л—Е –љ–∞–і–µ–ї–Њ–Ї —Б–≤–Њ–і–Є—В—Б—П –Ї –≤—Л—А–∞–≤–љ–Є–≤–∞–љ–Є—О –њ–Њ–њ—Г—В–љ–Њ–≥–Њ –њ–Њ—В–Њ–Ї–∞ –Є —Г–Љ–µ–љ—М—И–µ–љ–Є—О –Ј–∞–≤–Є—Е—А–µ–љ–Є–є –њ—А–Є —А–∞–±–Њ—В–µ –≤–Є–љ—В–∞.
–Я–Њ–≤–Њ—А–Њ—В–љ—Л–µ –љ–∞—Б–∞–і–Ї–Є –њ—А–µ–і—Б—В–∞–≤–ї—П—О—В —Б–Њ–±–Њ–є –љ–∞¬≠–њ—А–∞–≤–ї—П—О—Й—Г—О –љ–∞—Б–∞–і–Ї—Г –≥—А–µ–±–љ–Њ–≥–Њ –≤–Є–љ—В–∞, —Г–Ї—А–µ–њ–ї–µ–љ–љ—Г—О –љ–∞ –≤–µ—А¬≠—В–Є–Ї–∞–ї—М–љ–Њ–Љ –±–∞–ї–ї–µ—А–µ, –Њ—Б—М –Ї–Њ—В–Њ—А–Њ–≥–Њ –њ–µ—А–µ—Б–µ–Ї–∞–µ—В—Б—П —Б –Њ—Б—М—О –≥—А–µ–±–љ–Њ–≥–Њ –≤–Є–љ—В–∞ –≤ –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –і–Є—Б–Ї–∞ –≤–Є–љ—В–∞ (—А–Є—Б. 1.3). –Я–Њ–≤–Њ¬≠—А–Њ—В–љ–∞—П –љ–∞–њ—А–∞–≤–ї—П—О—Й–∞—П –љ–∞—Б–∞–і–Ї–∞ —П–≤–ї—П–µ—В—Б—П —З–∞—Б—В—М—О –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ–≥–Њ –Ї–Њ–Љ–њ–ї–µ–Ї—Б–∞ –Є –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ —Б–ї—Г–ґ–Є—В –Њ—А–≥–∞–љ–Њ–Љ —Г–њ—А–∞¬≠–≤–ї–µ–љ–Є—П, –Ј–∞–Љ–µ–љ—П—П —А—Г–ї—М.
–Т—Л–≤–µ–і–µ–љ–љ–∞—П –Є–Ј –Ф–Я –љ–∞—Б–∞–і–Ї–∞ —А–∞–±–Њ—В–∞–µ—В –Ї–∞–Ї –Ї–Њ–ї—М—Ж–µ–≤–Њ–µ –Ї—А—Л–ї–Њ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –±–Њ–Ї–Њ–≤–∞—П –њ–Њ–і—К–µ–Љ–љ–∞—П —Б–Є–ї–∞, –≤—Л–Ј—Л–≤–∞—О—Й–∞—П –њ–Њ–≤–Њ—А–Њ—В –Ї–Њ—А–∞–±–ї—П. –Т–Њ–Ј–љ–Є–Ї–∞—О—Й–Є–є –љ–∞ –±–∞–ї–ї–µ—А–µ –љ–∞—Б–∞–і–Ї–Є –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–є –Љ–Њ–Љ–µ–љ—В (–Ї–∞–Ї –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ, —В–∞–Ї –Є –љ–∞ –Ј–∞–і–љ–µ–Љ —Е–Њ–і—Г) —Б—В—А–µ–Љ–Є—В—Б—П —Г–≤–µ–ї–Є—З–Є—В—М —Г–≥–Њ–ї –µ–µ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є. –І—В–Њ–±—Л —Б–љ–Є–Ј–Є—В—М –≤–ї–Є—П–љ–Є–µ —Н—В–Њ–≥–Њ –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ–Њ–≥–Њ –Љ–Њ¬≠–Љ–µ–љ—В–∞, –≤ —Е–≤–Њ—Б—В–Њ–≤–Њ–є —З–∞—Б—В–Є –љ–∞—Б–∞–і–Ї–Є —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П —Б—В–∞–±–Є¬≠–ї–Є–Ј–∞—В–Њ—А —Б —Б–Є–Љ–Љ–µ—В—А–Є—З–љ—Л–Љ –њ—А–Њ—Д–Є–ї–µ–Љ.
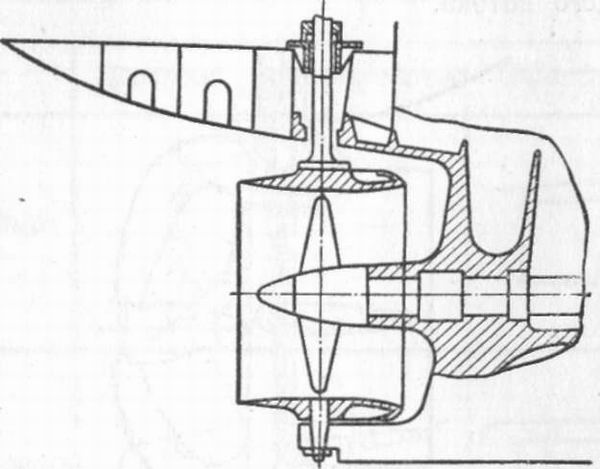
–†–Є—Б. 1.3. –Я–Њ–≤–Њ—А–Њ—В–љ–∞—П –љ–∞—Б–∞–і–Ї–∞
–Т—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П(3)
–Р–Ї—В–Є–≤–љ—Л–є —А—Г–ї—М (—А–Є—Б. 1.4) –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –Њ–±—Л—З–љ—Л–є —А—Г–ї—М —Б —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л–Љ –љ–∞ –љ–µ–Љ –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ—Л–Љ –≤–Є–љ—В–Њ–Љ –≤ –Ї–Њ—А–Њ—В–Ї–Њ–є –љ–∞—Б–∞–і–Ї–µ. –Т–Є–љ—В –њ—А–Є–≤–Њ–і–Є—В—Б—П –≤ –і–µ–є—Б—В–≤–Є–µ —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї–µ–Љ, —А–∞–Ј–Љ–µ—Й–µ–љ–љ—Л–Љ –≤ –≥–µ—А–Љ–µ—В–Є—З–љ–Њ–Љ –Ї–Њ—А–њ—Г—Б–µ.
–Ь–Њ—Й–љ–Њ—Б—В—М —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї—П —Б–Њ—Б—В–∞–≤–ї—П–µ—В –Њ–Ї–Њ–ї–Њ 8вАФ10% –Љ–Њ—Й–љ–Њ—Б—В–Є –≥–ї–∞–≤–љ–Њ–є —Н–љ–µ—А–≥–µ—В–Є—З–µ—Б–Ї–Њ–є —Г—Б—В–∞–љ–Њ–≤–Ї–Є, –∞ –і–Є–∞–Љ–µ—В—А –≤—Б–њ–Њ–Љ–Њ–≥–∞—В–µ–ї—М–љ–Њ–≥–Њ –≤–Є–љ—В–∞ –њ—А–Є–љ–Є–Љ–∞–µ—В—Б—П —А–∞–≤–љ—Л–Љ 20вАФ25% –Њ—Б¬≠–љ–Њ–≤–љ–Њ–≥–Њ. –Р–Ї—В–Є–≤–љ—Л–є —А—Г–ї—М –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –і–≤–Є–ґ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П —Б–Њ —Б–Ї–Њ—А–Њ—Б—В—М—О 3вАФ4 —Г–Ј. –Э–∞–Є–±–Њ–ї–µ–µ —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ –µ–≥–Њ –Є—Б–њ–Њ–ї—М¬≠–Ј–Њ–≤–∞–љ–Є–µ –≤ —А–µ–ґ–Є–Љ–µ, –±–ї–Є–Ј–Ї–Њ–Љ –Ї —И–≤–∞—А—В–Њ–≤–љ–Њ–Љ—Г. –Ґ–∞–Ї–Њ–є —А—Г–ї—М –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —А–∞–Ј–≤–Њ—А–Њ—В –Ї–Њ—А–∞–±–ї—П –±–µ–Ј —Е–Њ–і–∞, –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –љ–∞ –Љ–µ—Б—В–µ. –Я—А–Є–≤–Њ–і –∞–Ї—В–Є–≤–љ–Њ–≥–Њ —А—Г–ї—П –і–Њ–њ—Г—Б–Ї–∞–µ—В –µ–≥–Њ —А–∞–Ј–≤–Њ—А–Њ—В –Њ—В¬≠–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Ф–Я –Ї–Њ—А–∞–±–ї—П –і–Њ 70вАФ90¬∞. –Я—А–Є –≤—Л–Ї–ї—О—З–µ–љ–љ–Њ–Љ —Н–ї–µ–Ї—В—А–Њ–Љ–Њ—В–Њ—А–µ –∞–Ї—В–Є–≤–љ—Л–є —А—Г–ї—М –і–µ–є—Б—В–≤—Г–µ—В, –Ї–∞–Ї –Њ–±—Л—З–љ—Л–є.

–†–Є—Б. 1.4. –Р–Ї—В–Є–≤–љ—Л–є —А—Г–ї—М
–Я–Њ–і—А—Г–ї–Є–≤–∞—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ (—А–Є—Б. 1.5) –Ї–Њ–љ¬≠—Б—В—А—Г–Ї—В–Є–≤–љ–Њ –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є —Ж–Є–ї–Є–љ–і—А–Є—З–µ—Б–Ї—Г—О —В—А—Г–±—Г 3 –≤ –Ї–Њ—А–њ—Г—Б–µ —Б—Г–і–љ–∞ —Б —А–∞–Ј–Љ–µ—Й–µ–љ–љ—Л–Љ –≤ –љ–µ–Љ –і–≤–Є–ґ–Є—В–µ–ї–µ–Љ 1, —Б–њ–Њ¬≠—Б–Њ–±–љ—Л–Љ —Б–Њ–Ј–і–∞–≤–∞—В—М —В—П–≥—Г –≤ –і–≤—Г—Е –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ–љ—Л—Е –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е, –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А–љ—Л—Е –Ї –Ф–Я.
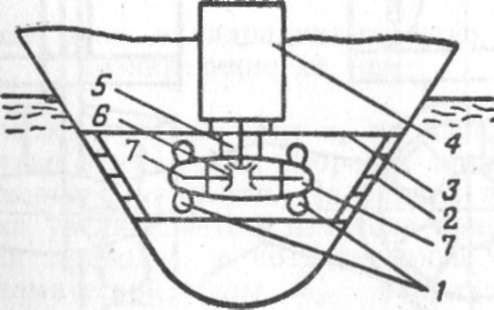
–†–Є—Б. 1.5. –Я—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞ –њ–Њ–і¬≠—А—Г–ї–Є–≤–∞—О—Й–µ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞ —Б –Њ—Б–љ–Њ–≤¬≠–љ—Л–Љ–Є –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ–љ–Њ –≤—А–∞—Й–∞—О—Й–Є¬≠–Љ–Є—Б—П –≤–Є–љ—В–∞–Љ–Є
–Т—Е–Њ–і–љ—Л–µ –Ї—А–Њ–Љ–Ї–Є –Ї–∞–љ–∞–ї–∞ –і–ї—П –њ–Њ–≤—Л—И–µ–љ–Є—П —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В–Є –Я–£ –Ј–∞–Ї—А—Г–≥–ї–µ–љ—Л. –Э–∞ –≤—Е–Њ–і–µ –Я–£ —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В—Б—П –Ј–∞—Й–Є—В–љ—Л–µ —А–µ—И–µ—В–Ї–Є 2. –Ь–Њ—Й–љ–Њ—Б—В—М –Њ—В –і–≤–Є–≥–∞—В–µ–ї—П 4 –њ–µ—А–µ–і–∞–µ—В—Б—П —З–µ—А–µ–Ј –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–є –≤–∞–ї 5, –Ї–Њ–љ–Є¬≠—З–µ—Б–Ї–Є–є —А–µ–і—Г–Ї—В–Њ—А 6 –Є –≥–Њ—А–Є–Ј–Њ–љ—В–∞–ї—М–љ—Л–µ –≤–∞–ї—Л 7. –Я–Њ —В–Є–њ—Г –і–≤–Є–ґ–Є—В–µ–ї–µ–є —А–∞–Ј–ї–Є—З–∞—О—В –њ–Њ–і—А—Г–ї–Є–≤–∞—О—Й–Є–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞ —Б –≥—А–µ–±¬≠–љ—Л–Љ–Є –≤–Є–љ—В–∞–Љ–Є (–≤–Є–љ—В —Д–Є–Ї—Б–Є—А–Њ–≤–∞–љ–љ–Њ–≥–Њ —И–∞–≥–∞ вАФ –Т–§–® –Є –≤–Є–љ—В —А–µ–≥—Г–ї–Є—А—Г–µ–Љ–Њ–≥–Њ —И–∞–≥–∞ вАФ –Т–†–®), –Ї—А—Л–ї—М—З–∞—В—Л–Љ –і–≤–Є–ґ–Є—В–µ–ї–µ–Љ –Є–ї–Є —А–µ–≤–µ—А—Б–Є–≤–љ—Л–Љ–Є –љ–∞—Б–Њ—Б–∞–Љ–Є. –Ю–±—Л—З–љ–Њ –њ–Њ–і—А—Г–ї–Є–≤–∞—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В—Б—П –≤ –љ–Њ—Б–Њ–≤–Њ–є –Є–ї–Є –Ї–Њ—А–Љ–Њ–≤–Њ–є —З–∞—Б—В–Є.

–†–Є—Б. 1.6. –Я—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞ –≤—Л–і–≤–Є–ґ–љ–Њ–є –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ-—А—Г–ї–µ–≤–Њ–є –Ї–Њ–ї–Њ–љ–Ї–Є
–Ш–љ–Њ–≥–і–∞ –њ—А–Є–Љ–µ–љ—П—О—В—Б—П –і–≤–∞ —Г—Б—В—А–Њ–є—Б—В–≤–∞ вАФ –љ–Њ—Б–Њ–≤–Њ–µ –Є –Ї–Њ—А–Љ–Њ¬≠–≤–Њ–µ. –Ъ–∞–Ї –њ–Њ–Ї–∞–Ј—Л–≤–∞–µ—В –Њ–њ—Л—В —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є–Є, —Н—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—М –і–µ–є—Б—В–≤–Є—П –њ–Њ–і—А—Г–ї–Є–≤–∞—О—Й–Є—Е —Г—Б—В—А–Њ–є—Б—В–≤ —А–µ–Ј–Ї–Њ —Б–љ–Є–ґ–∞–µ—В—Б—П —Б —Г–≤–µ–ї–Є—З–µ–љ–Є–µ–Љ —Б–Ї–Њ—А–Њ—Б—В–Є —Е–Њ–і–∞.
–Т—Л–і–≤–Є–ґ–љ–∞—П –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ-—А—Г–ї–µ–≤–∞—П –Ї–Њ–ї–Њ–љ–Ї–∞ (—А–Є—Б. 1.6). –Ф–≤–Є–ґ–Є—В–µ–ї–µ–Љ –≤ –Т–Ф–†–Ъ —П–≤–ї—П–µ—В—Б—П –≤–Є–љ—В 1, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л–є –≤ –љ–∞–њ—А–∞–≤–ї—П—О—Й–µ–є –љ–∞—Б–∞–і–Ї–µ 2. –Ь–Њ—Й–љ–Њ—Б—В—М –Ї –≤–Є–љ—В—Г –њ–µ—А–µ–і–∞–µ—В—Б—П –Њ—В —Н–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї—П 3 —З–µ—А–µ–Ј –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–є –≤–∞–ї 4, –≤–µ—А—Е–љ–Є–є —Ж–Є–ї–Є–љ–і—А–Є—З–µ—Б–Ї–Є–є —А–µ–і—Г–Ї—В–Њ—А 5, –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Л–є —И–ї–Є—Ж–µ–≤–Њ–є –≤–∞–ї 6, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л–є –≤–љ—Г—В—А–Є –±–∞–ї–ї–µ—А–∞ –Ї–Њ–ї–Њ–љ–Ї–Є 7, –Є –љ–Є–ґ–љ–Є–є —Г–≥–ї–Њ¬≠–≤–Њ–є —А–µ–і—Г–Ї—В–Њ—А 8. –Ь–µ—Е–∞–љ–Є–Ј–Љ –њ–Њ–≤–Њ—А–Њ—В–∞ 9 –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —А–∞–Ј¬≠–≤–Њ—А–Њ—В –Ї–Њ–Љ–њ–ї–µ–Ї—Б–∞ –≤–Є–љ—В вАФ –љ–∞—Б–∞–і–Ї–∞ –љ–∞ –ї—О–±–Њ–є —Г–≥–Њ–ї. –Я–Њ–і—К–µ–Љ –Є –Њ–њ—Г—Б–Ї–∞–љ–Є–µ –Ї–Њ–Љ–њ–ї–µ–Ї—Б–∞ –њ—А–Њ–Є–Ј–≤–Њ–і—П—В—Б—П —Б –њ–Њ–Љ–Њ—Й—М—О –Љ–µ—Е–∞¬≠–љ–Є–Ј–Љ–∞ –њ–Њ–і—К–µ–Љ–∞ 10 –≤ –≤–Є–і–µ —В–µ–ї–µ—Б–Ї–Њ–њ–Є—З–µ—Б–Ї–Њ–≥–Њ –≥–Є–і—А–Њ—Ж–Є–ї–Є–љ–і—А–∞.
–Я–Њ–≤–Њ—А–Њ—В–љ—Л–µ –Ї–Њ–ї–Њ–љ–Ї–Є –њ–Њ —Б–≤–Њ–µ–Љ—Г –њ—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–Њ–Љ—Г —Г—Б—В—А–Њ–є—Б—В–≤—Г —Б—Е–Њ–ґ–Є —Б –Т–Ф–†–Ъ, –љ–Њ –љ–µ –Є–Љ–µ—О—В –Љ–µ—Е–∞–љ–Є–Ј–Љ–∞ –њ–Њ–і—К¬≠–µ–Љ–∞. –Т —А—П–і–µ —Б–ї—Г—З–∞–µ–≤ –Є—Б–њ–Њ–ї—М–Ј—Г—О—В—Б—П –Њ—В–Ї–Є–і–љ—Л–µ –њ–Њ–≤–Њ—А–Њ—В–љ—Л–µ –Ї–Њ–ї–Њ–љ–Ї–Є.
–Ш–Ј –њ–µ—А–µ—З–Є—Б–ї–µ–љ–љ—Л—Е –≤—Л—И–µ –°–Р–£ –љ–∞–Є–±–Њ–ї–µ–µ —Н—Д—Д–µ–Ї—В–Є–≤–љ—Л –Т–Ф–†–Ъ: –Ю–љ–Є –Љ–Њ–≥—Г—В —Г–±–Є—А–∞—В—М—Б—П –љ–∞ —Е–Њ–і—Г –Ї–Њ—А–∞–±–ї—П –Є –љ–µ —Б–Њ–Ј¬≠–і–∞—О—В –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–≥–Њ —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є—П.
–≠—Д—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—М –ї—О–±–Њ–≥–Њ –°–Р–£ —Е–∞—А–∞–Ї—В–µ—А–Є–Ј—Г–µ—В—Б—П —Г–і–µ–ї—М–љ–Њ–є —В—П–≥–Њ–є, —В. –µ. —В—П–≥–Њ–є –љ–∞ –µ–і–Є–љ–Є—Ж—Г –Ј–∞—В—А–∞—З–µ–љ–љ–Њ–є –Љ–Њ—Й–љ–Њ—Б—В–Є. –Ю–±—Л—З–љ–Њ –Њ–љ–∞ —Б–Њ—Б—В–∞–≤–ї—П–µ—В –љ–µ –Љ–µ–љ–µ–µ 10 –Ї–≥—Б/–ї. —Б. –°–Р–£ –Љ–Њ–ґ–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –Ї–∞–Ї —Б–Њ–≤–Љ–µ—Б—В–љ–Њ —Б –≥–ї–∞–≤–љ—Л–Љ –і–≤–Є–ґ–Є—В–µ–ї—М–љ–Њ-—А—Г–ї–µ–≤—Л–Љ –Ї–Њ–Љ–њ–ї–µ–Ї—Б–Њ–Љ, —В–∞–Ї –Є —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ–Њ. –Ю–љ–Є –љ–∞—Е–Њ–і—П—В —И–Є—А–Њ–Ї–Њ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –і–ї—П —И–≤–∞—А—В–Њ–≤–Ї–Є, —А–∞–Ј–≤–Њ¬≠—А–Њ—В–∞ –≤ —Г–Ј–Ї–Њ—Б—В–Є –њ—А–Є –Њ—В—Б—Г—В—Б—В–≤–Є–Є —Е–Њ–і–∞ –Є –Љ–∞–ї—Л—Е —Е–Њ–і–∞—Е.
–Ф–µ–є—Б—В–≤–Є–µ —А—Г–ї—П –Є –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Б–Є–ї—Л, –≤–Њ–Ј–љ–Є–Ї–∞—О—Й–Є–µ –љ–∞ –љ–µ–Љ
–Я—А–Є –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П –љ–∞ —Г–≥–Њ–ї α—А –љ–∞ –њ–µ—А–µ–і–љ–µ–є –µ–≥–Њ –њ–ї–Њ¬≠—Б–Ї–Њ—Б—В–Є –≤—Б–ї–µ–і—Б—В–≤–Є–µ —Г–Љ–µ–љ—М—И–µ–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є –њ–Њ—В–Њ–Ї–∞ –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –Њ–±–ї–∞—Б—В—М –њ–Њ–≤—Л—И–µ–љ–љ–Њ–≥–Њ –і–∞–≤–ї–µ–љ–Є—П. –Э–∞ –Ј–∞–і–љ–µ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, –≥–і–µ —Б–Ї–Њ—А–Њ—Б—В—М –њ–Њ—В–Њ–Ї–∞ —Г–≤–µ–ї–Є—З–Є–≤–∞–µ—В—Б—П, –і–∞–≤–ї–µ–љ–Є–µ –њ–Њ–љ–Є–ґ–∞–µ—В—Б—П. –†–∞–Ј¬≠–љ–Њ—Б—В—М –і–∞–≤–ї–µ–љ–Є–є –њ—А–Є–≤–Њ–і–Є—В –Ї –≤–Њ–Ј–љ–Є–Ї–љ–Њ–≤–µ–љ–Є—О —А–µ–Ј—Г–ї—М—В–Є—А—Г—О¬≠—Й–µ–є –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Њ–є —Б–Є–ї—Л Rp, –љ–∞–њ—А–∞–≤–ї–µ–љ–љ–Њ–є –њ–Њ—З—В–Є –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А–љ–Њ –Ї –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –њ–µ—А–∞ —А—Г–ї—П –Є –њ—А–Є–ї–Њ–ґ–µ–љ–љ–Њ–є –≤ —Ж–µ–љ—В—А–µ –µ–≥–Њ –і–∞–≤–ї–µ–љ–Є—П(4).
–Т–µ–ї–Є—З–Є–љ–∞ Rp –Ј–∞–≤–Є—Б–Є—В –Њ—В –њ–ї–Њ—Й–∞–і–Є –њ–µ—А–∞ —А—Г–ї—П, —Г–≥–ї–∞ –∞—В–∞–Ї–Є –Є –њ—А–Є–Љ–µ—А–љ–Њ –њ—А–Њ–њ–Њ—А—Ж–Є–Њ–љ–∞–ї—М–љ–∞ –Ї–≤–∞–і—А–∞—В—Г —Б–Ї–Њ—А–Њ—Б—В–Є –њ–Њ¬≠—В–Њ–Ї–∞ –≤–Њ–і—Л, –љ–∞–±–µ–≥–∞—О—Й–µ–≥–Њ –љ–∞ —А—Г–ї—М.
–Ф–ї—П —А–∞—Б—Б–Љ–Њ—В—А–µ–љ–Є—П –і–µ–є—Б—В–≤–Є—П —А—Г–ї—П —А–∞–≤–љ–Њ–і–µ–є—Б—В–≤—Г—О—Й—Г—О Rp —А–∞—Б–Ї–ї–∞–і—Л–≤–∞—О—В –љ–∞ —Б–Њ—Б—В–∞–≤–ї—П—О—Й–Є–µ –≤ –Њ—Б—П—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В, –љ–µ–Є–Ј¬≠–Љ–µ–љ–љ–Њ —Б–≤—П–Ј–∞–љ–љ—Л—Е —Б –Ї–Њ—А–∞–±–ї–µ–Љ: Rpy (–њ–Њ–і—К–µ–Љ–љ–∞—П —Б–Є–ї–∞), Rpx (–ї–Њ–±–Њ–≤–Њ–µ —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є–µ) –Є —Б–Њ—Б—В–∞–≤–ї—П—О—Й–Є–µ –Њ—В–љ–Њ—Б–Є¬≠—В–µ–ї—М–љ–Њ –Њ—Б–Є –±–∞–ї–ї–µ—А–∞ Rpn –Є Rpt (–љ–Њ—А–Љ–∞–ї—М–љ–∞—П –Є —В–∞–љ–≥–µ–љ¬≠—Ж–Є–∞–ї—М–љ–∞—П —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–µ–љ–љ–Њ) (—А–Є—Б. 1.7).
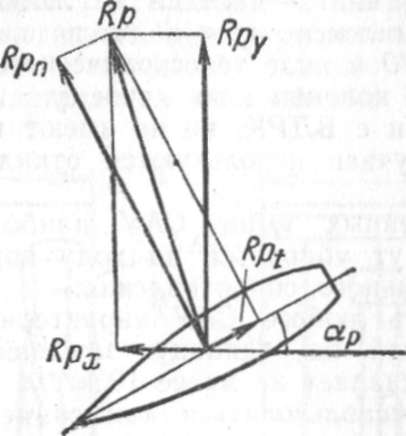
–†–Є—Б. 1.7. –У–Є–і—А–Њ–і–Є–љ–∞–Љ–Є¬≠—З–µ—Б–Ї–Є–µ —Б–Є–ї—Л, –і–µ–є—Б—В–≤—Г—О¬≠—Й–Є–µ –љ–∞ —А—Г–ї—М
–У–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ —Б–Є–ї—Л —Б–≤—П–Ј–∞–љ—Л —Б —А–∞–≤–љ–Њ–і–µ–є—Б—В–≤—Г—О—Й–µ–є –Є –Љ–µ–ґ–і—Г —Б–Њ–±–Њ–є —Б–ї–µ–і—Г—О—Й–Є–Љ–Є –Њ—В–љ–Њ—И–µ–љ–Є—П–Љ–Є:
–Ф–µ–є—Б—В–≤–Є–µ —А—Г–ї—П –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Е–Њ–і—Г (—А–Є—Б. 1.8, –∞). –Я–µ¬≠—А–µ–Ї–ї–∞–і–Ї–∞ —А—Г–ї—П –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Е–Њ–і—Г —Б–Њ–њ—А–Њ–≤–Њ–ґ–і–∞–µ—В—Б—П –њ–Њ—П–≤–ї–µ¬≠–љ–Є–µ–Љ –±–Њ–Ї–Њ–≤–Њ–є –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Њ–є —Б–Є–ї—Л Rpy. –Я—А–Є–Ї–ї–∞–і—Л–≤–∞—П –≤ —Ж–µ–љ—В—А–µ —В—П–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П G –і–≤–µ —А–∞–≤–љ—Л–µ –Є –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ¬≠–љ–Њ –љ–∞–њ—А–∞–≤–ї–µ–љ–љ—Л–µ —Б–Є–ї—Л Rpy –њ–Њ–ї—Г—З–∞—О—В –Љ–Њ–Љ–µ–љ—В Rpyl. –Ф–µ–є¬≠—Б—В–≤–Є–µ –Љ–Њ–Љ–µ–љ—В–∞ RPyl —Б–Њ–њ—А–Њ–≤–Њ–ґ–і–∞–µ—В—Б—П –Њ–±—А–∞—В–љ—Л–Љ —Б–Љ–µ—Й–µ–љ–Є–µ–Љ –Ї–Њ—А–∞–±–ї—П –Є –њ–Њ—П–≤–ї–µ–љ–Є–µ–Љ —Г–≥–ї–∞ –і—А–µ–є—Д–∞ α. –Э–∞–ї–Є—З–Є–µ —Г–≥–ї–∞ –і—А–µ–є¬≠—Д–∞ –њ—А–Є–≤–Њ–і–Є—В –Ї –Њ–±—А–∞–Ј–Њ–≤–∞–љ–Є—О –±–Њ–Ї–Њ–≤–Њ–є —Б–Є–ї—Л Fy, –њ—А–Є–ї–Њ–ґ–µ–љ¬≠–љ–Њ–є –≤ —Ж–µ–љ—В—А–µ —Б–Њ–њ—А–Њ—В–Є–≤–ї–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П –Є –Њ–±—А–∞—В–љ–Њ–є –њ–Њ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—О Rpy. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —А–∞–Ј–≤–Њ—А–∞—З–Є–≤–∞—О—Й–Є–є –Љ–Њ–Љ–µ–љ—В –њ—А–Є –і–≤–Є–ґ–µ–љ–Є–Є –Ї–Њ—А–∞–±–ї—П –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ —Е–Њ–і—Г –Њ–њ—А–µ–і–µ–ї–Є—В—Б—П –Ї–∞–Ї —Б—Г–Љ–Љ–∞ –Љ–Њ–Љ–µ–љ—В–Њ–≤ –Њ—В —Б–Є–ї RPy –Є Fy:
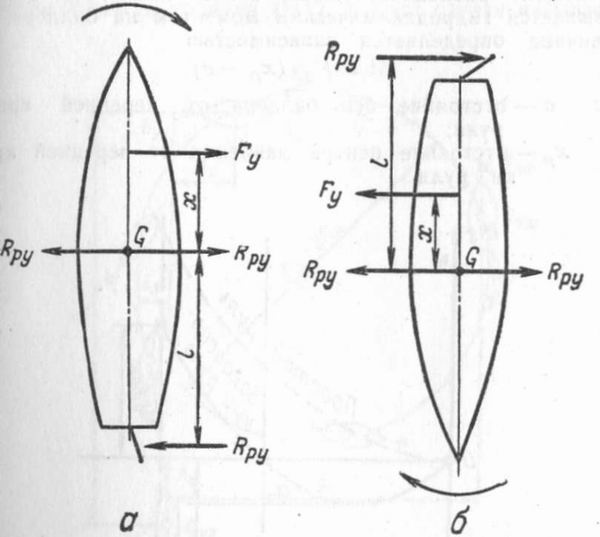
–†–Є—Б. 1.8. –°–Є–ї—Л, –і–µ–є—Б—В–≤—Г—О—Й–Є–µ –љ–∞ –Ї–Њ—А–∞–±–ї—М –њ—А–Є –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П
–Ф–µ–є—Б—В–≤–Є–µ —А—Г–ї—П –љ–∞ –Ј–∞–і–љ–µ–Љ —Е–Њ–і—Г (—А–Є—Б. 1.8,6). –Э–∞ –Ј–∞–і–љ–µ–Љ —Е–Њ–і—Г –њ–µ—А–µ–Ї–ї–∞–і–Ї–∞ —А—Г–ї—П —В–∞–Ї–ґ–µ –≤—Л–Ј—Л–≤–∞–µ—В –њ–Њ—П–≤–ї–µ–љ–Є–µ —Б–Є¬≠–ї—Л RPy –і–µ–є—Б—В–≤–Є–µ –Љ–Њ–Љ–µ–љ—В–∞ RPyl –Є –≤–Њ–Ј–љ–Є–Ї–љ–Њ–≤–µ–љ–Є–µ –і—А–µ–є—Д–∞ –Ї–Њ—А–∞–±–ї—П. –Я–Њ—П–≤–ї–µ–љ–Є–µ –і—А–µ–є—Д–∞ —В–∞–Ї–ґ–µ —Б–Њ–њ—А–Њ–≤–Њ–ґ–і–∞–µ—В—Б—П –≤–Њ–Ј¬≠–љ–Є–Ї–љ–Њ–≤–µ–љ–Є–µ–Љ —Б–Є–ї—Л Fy –Є –і–µ–є—Б—В–≤–Є–µ–Љ –Љ–Њ–Љ–µ–љ—В–∞ Fyx. –Ю–і–љ–∞–Ї–Њ –і–µ–є—Б—В–≤–Є–µ Fyx –њ—А–Њ—В–Є–≤–Њ–њ–Њ–ї–Њ–ґ–љ–Њ –њ–Њ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—О –і–µ–є—Б—В¬≠–≤–Є—О Rpyl.
–Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —А–∞–Ј–≤–Њ—А–Њ—В –Ї–Њ—А–∞–±–ї—П –љ–∞ –Ј–∞–і–љ–µ–Љ —Е–Њ–і—Г –±—Г¬≠–і–µ—В –њ—А–Њ–Є—Б—Е–Њ–і–Є—В—М –њ–Њ–і –і–µ–є—Б—В–≤–Є–µ–Љ —А–∞–Ј–љ–Њ—Б—В–Є –Љ–Њ–Љ–µ–љ—В–Њ–≤;
–Я–Њ—Н—В–Њ–Љ—Г —Г–њ—А–∞–≤–ї—П–µ–Љ–Њ—Б—В—М –Ї–Њ—А–∞–±–ї–µ–Љ –њ–Њ–і –і–µ–є—Б—В–≤–Є–µ–Љ —А—Г–ї—П –љ–∞ –Ј–∞–і–љ–µ–Љ —Е–Њ–і—Г –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ —Е—Г–ґ–µ, —З–µ–Љ –љ–∞ –њ–µ—А–µ–і–љ–µ–Љ. –Т—Л¬≠—Е–Њ–і –Є–Ј —Г—Б—В–∞–љ–Њ–≤–Є–≤—И–µ–є—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Ј–∞–і–љ–µ–≥–Њ —Е–Њ–і–∞ —Б –њ–Њ¬≠–Љ–Њ—Й—М—О –Њ–і–љ–Њ–≥–Њ —А—Г–ї—П –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є –љ–µ–≤–Њ–Ј–Љ–Њ–ґ–µ–љ.
–Ь–Њ–Љ–µ–љ—В —А–∞–≤–љ–Њ–і–µ–є—Б—В–≤—Г—О—Й–µ–є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Њ—Б–Є –±–∞–ї–ї–µ—А–∞ –љ–∞–Ј—Л–≤–∞–µ—В—Б—П –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–Љ –Љ–Њ–Љ–µ–љ—В–Њ–Љ –љ–∞ –±–∞–ї–ї–µ—А–µ. –Х–≥–Њ –≤–µ–ї–Є—З–Є–љ–∞ –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В—М—О
–≥–і–µ –∞ вАФ –Њ—В—Б—В–Њ—П–љ–Є–µ –Њ—Б–Є –±–∞–ї–ї–µ—А–∞ –Њ—В –њ–µ—А–µ–і–љ–µ–є –Ї—А–Њ–Љ–Ї–Є —А—Г–ї—П;
X—А вАФ –Њ—В—Б—В–Њ—П–љ–Є–µ —Ж–µ–љ—В—А–∞ –і–∞–≤–ї–µ–љ–Є—П –Њ—В –њ–µ—А–µ–і–љ–µ–є –Ї—А–Њ–Љ¬≠–Ї–Є —А—Г–ї—П.

–†–Є—Б. 1.9. –У–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–µ –Љ–Њ–Љ–µ–љ—В—Л –љ–∞ –±–∞–ї–ї–µ—А–µ –њ—А–Њ—Б—В–Њ–≥–Њ –Є –±–∞–ї–∞–љ—Б–Є—А–љ–Њ–≥–Њ —А—Г–ї—П
–£ –±–∞–ї–∞–љ—Б–Є—А–љ–Њ–≥–Њ —А—Г–ї—П (—А–Є—Б. 1.9) –њ—А–Є –Љ–∞–ї—Л—Е —Г–≥–ї–∞—Е –њ–µ—А–µ¬≠–Ї–ї–∞–і–Ї–Є —Ж–µ–љ—В—А –і–∞–≤–ї–µ–љ–Є—П —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В—Б—П –≤–њ–µ—А–µ–і–Є, –∞ –њ—А–Є –±–Њ–ї—М—И–Є—Е вАФ –њ–Њ–Ј–∞–і–Є –Њ—Б–Є –±–∞–ї–ї–µ—А–∞. –£ –њ—А–Њ—Б—В–Њ–≥–Њ —А—Г–ї—П –њ–Њ –Љ–µ—А–µ —Г–≤–µ–ї–Є—З–µ–љ–Є—П —Г–≥–ї–∞ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —Ж–µ–љ—В—А –і–∞–≤–ї–µ–љ–Є—П –≤—Б–µ –≤—А–µ–Љ—П —Г–і–∞–ї—П–µ—В—Б—П –Њ—В –Њ—Б–Є –≤—А–∞—Й–µ–љ–Є—П. –≠—В–Њ –њ—А–Є–≤–Њ–і–Є—В –Ї –њ–Њ—Б—В–Њ—П–љ–љ–Њ–Љ—Г –≤–Њ–Ј—А–∞—Б—В–∞–љ–Є—О –≥–Є–і—А–Њ–і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Њ–≥–Њ –Љ–Њ–Љ–µ–љ—В–∞ –љ–∞ –±–∞–ї–ї–µ—А–µ. –Я—А–Є —Н—В–Њ–Љ –і–ї—П –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П –љ—Г–ґ–љ–∞ —А—Г–ї–µ–≤–∞—П –Љ–∞—И–Є–љ–∞ –±–Њ–ї—М¬≠—И–Њ–є –Љ–Њ—Й–љ–Њ—Б—В–Є.
–¶–Є—А–Ї—Г–ї—П—Ж–Є—П –Ї–Њ—А–∞–±–ї—П
–Я—А–Є –≤—Л–≤–Њ–і–µ —А—Г–ї—П –Є–Ј –Ф–Я –љ–∞ –љ–µ–Ї–Њ—В–Њ—А—Л–є —Г–≥–Њ–ї –Ї–Њ—А–∞–±–ї—М –љ–∞—З–љ–µ—В —Б–Њ–≤–µ—А—И–∞—В—М –Ї—А–Є–≤–Њ–ї–Є–љ–µ–є–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ –њ–Њ –љ–µ–Ј–∞–Љ–Ї–љ—Г¬≠—В–Њ–є –Ї—А–Є–≤–Њ–є —Б–њ–Є—А–∞–ї—М–љ–Њ–≥–Њ —В–Є–њ–∞. –Ґ—А–∞–µ–Ї—В–Њ—А–Є—П, –Њ–њ–Є—Б—Л–≤–∞–µ–Љ–∞—П —Ж–µ–љ—В—А–Њ–Љ —В—П–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П (–¶–Ґ), –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –љ–∞–Ј—Л–≤–∞–µ—В—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–µ–є (—А–Є—Б. 1.10).
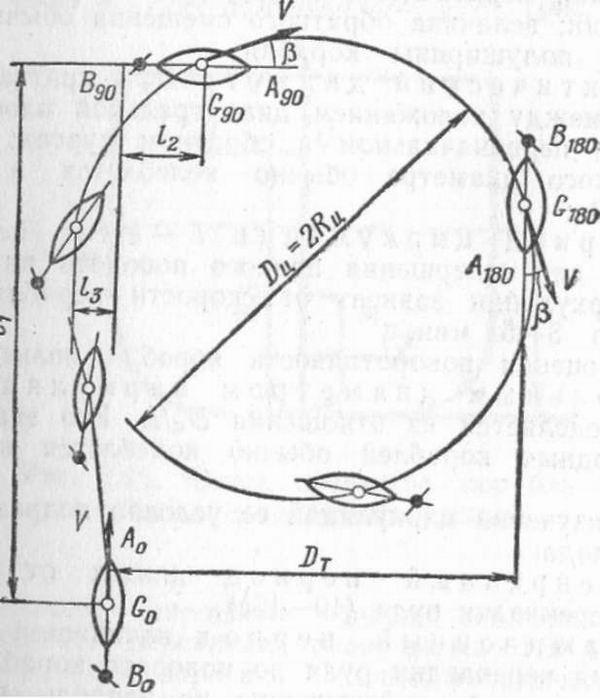
–†–Є—Б. 1.10. –¶–Є—А–Ї—Г–ї—П—Ж–Є—П –Ї–Њ—А–∞–±–ї—П
–Ъ–Њ–≥–і–∞ –і–≤–Є–ґ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П —Г—Б—В–∞–љ–Њ–≤–Є—В—Б—П, —Ж–Є—А–Ї—Г–ї—П—Ж–Є—П —Б—В–∞–љ–Њ–≤–Є—В—Б—П –Њ–Ї—А—Г–ґ–љ–Њ—Б—В—М—О. –Ф–Є–∞¬≠–Љ–µ—В—А —Н—В–Њ–є –Њ–Ї—А—Г–ґ–љ–Њ—Б—В–Є –љ–∞–Ј—Л–≤–∞–µ—В—Б—П –і–Є–∞–Љ–µ—В—А–Њ–Љ —Ж–Є—А¬≠–Ї—Г–ї—П—Ж–Є–Є D—Ж.
–•–∞—А–∞–Ї—В–µ—А–Є—Б—В–Є–Ї–Є —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Њ–љ–љ–Њ–є –Ї—А–Є–≤–Њ–є:
- –≤—Л–і–≤–Є–≥ l1; вАФ —А–∞—Б—Б—В–Њ—П–љ–Є–µ, –њ—А–Њ—Е–Њ–і–Є–Љ–Њ–µ —Ж–µ–љ—В—А–Њ–Љ —В—П¬≠–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –≤ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–Є –њ—А—П–Љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –Њ—В –Љ–Њ–Љ–µ–љ—В–∞ –љ–∞—З–∞–ї–∞ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П –і–Њ –њ–Њ–≤–Њ—А–Њ—В–∞ –љ–∞ 90¬∞; –≤–µ–ї–Є—З–Є–љ–∞ –≤—Л–і–≤–Є–≥–∞ –Љ–µ–љ—П–µ—В—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е 0,6вАФ1,2 D—Ж;
вАФ –њ—А—П–Љ–Њ–µ —Б–Љ–µ—Й–µ–љ–Є–µ l2 вАФ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –њ–Њ –њ–µ—А–њ–µ–љ¬≠–і–Є–Ї—Г–ї—П—А—Г –Ї –њ–µ—А–≤–Њ–љ–∞—З–∞–ї—М–љ–Њ–Љ—Г –Ї—Г—А—Б—Г, –љ–∞ –Ї–Њ—В–Њ—А–Њ–µ —Б–Љ–µ—Й–∞–µ—В—Б—П —Ж–µ–љ—В—А —В—П–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –≤ —Б—В–Њ—А–Њ–љ—Г —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Ї –Љ–Њ–Љ–µ–љ—В—Г –µ–≥–Њ –њ–Њ–≤–Њ—А–Њ—В–∞ –љ–∞ 90¬∞; –≤–µ–ї–Є—З–Є–љ–∞ –њ—А—П–Љ–Њ–≥–Њ —Б–Љ–µ—Й–µ–љ–Є—П –Є–Ј–Љ–µ¬≠–љ—П–µ—В—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е 0,25вАФ0,50 D—Ж;
вАФ –Њ–±—А–∞—В–љ–Њ–µ —Б–Љ–µ—Й–µ–љ–Є–µ l3 вАФ –љ–∞–Є–±–Њ–ї—М—И–µ–µ —А–∞—Б¬≠—Б—В–Њ—П–љ–Є–µ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–µ —Б–Љ–µ—Й–∞–µ—В—Б—П —Ж–µ–љ—В—А —В—П–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –Њ—В –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П –њ–µ—А–≤–Њ–љ–∞—З–∞–ї—М–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –≤ —Б—В–Њ—А–Њ–љ—Г, –Њ–±—А–∞—В–љ—Г—О —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є; –≤–µ–ї–Є—З–Є–љ–∞ –Њ–±—А–∞—В–љ–Њ–≥–Њ —Б–Љ–µ—Й–µ–љ–Є—П –Њ–±—Л—З–љ–Њ –љ–µ –њ—А–µ¬≠–≤–Њ—Б—Е–Њ–і–Є—В –њ–Њ–ї—Г—И–Є—А–Є–љ—Л –Ї–Њ—А–∞–±–ї—П;
вАФ —В–∞–Ї—В–Є—З–µ—Б–Ї–Є–є –і–Є–∞–Љ–µ—В—А DT вАФ –Ї—А–∞—В—З–∞–є—И–µ–µ —А–∞—Б¬≠—Б—В–Њ—П–љ–Є–µ –Љ–µ–ґ–і—Г –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ–Љ –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є –Ї–Њ¬≠—А–∞–±–ї—П –љ–∞ –њ–µ—А–≤–Њ–љ–∞—З–∞–ї—М–љ–Њ–Љ –Є –Њ–±—А–∞—В–љ–Њ–Љ –Ї—Г—А—Б–∞—Е; –≤–µ–ї–Є—З–Є–љ–∞ —В–∞–Ї—В–Є—З–µ—Б–Ї–Њ–≥–Њ –і–Є–∞–Љ–µ—В—А–∞ –Њ–±—Л—З–љ–Њ –Ї–Њ–ї–µ–±–ї–µ—В—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е 0,9-1,2 D—Ж;
вАФ –њ–µ—А–Є–Њ–і —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Ґ вАФ –≤—А–µ–Љ—П, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ–µ –Ї–Њ—А–∞–±–ї—О –і–ї—П —Б–Њ–≤–µ—А—И–µ–љ–Є—П –њ–Њ–ї–љ–Њ–≥–Њ –њ–Њ–≤–Њ—А–Њ—В–∞ –љ–∞ 360¬∞. –Я–µ¬≠—А–Є–Њ–і —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Ј–∞–≤–Є—Б–Є—В –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –Є —А–∞–≤–µ–љ –њ—А–Є–Љ–µ—А–љ–Њ 3вАФ5 –Љ–Є–љ.
–Ф–ї—П –Њ—Ж–µ–љ–Ї–Є –њ–Њ–≤–Њ—А–Њ—В–ї–Є–≤–Њ—Б—В–Є –Ї–Њ—А–∞–±–ї—П –њ–Њ–ї—М–Ј—Г—О—В—Б—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Л–Љ –і–Є–∞–Љ–µ—В—А–Њ–Љ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є, –Ї–Њ—В–Њ¬≠—А—Л–є –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Є–Ј –Њ—В–љ–Њ—И–µ–љ–Є—П D—Ж/L. –Х–≥–Њ –Ј–љ–∞—З–µ–љ–Є–µ –і–ї—П –±—Л—Б—В—А–Њ—Е–Њ–і–љ—Л—Е –Ї–Њ—А–∞–±–ї–µ–є –Њ–±—Л—З–љ–Њ –Ї–Њ–ї–µ–±–ї–µ—В—Б—П –≤ –њ—А–µ–і–µ–ї–∞—Е 4вАФ7.
–Я—А–Є –Є–Ј—Г—З–µ–љ–Є–Є —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –µ–µ —Г—Б–ї–Њ–≤–љ–Њ –њ–Њ–і—А–∞–Ј–і–µ–ї—П—О—В –љ–∞ —В—А–Є –њ–µ—А–Є–Њ–і–∞.
–Ь–∞–љ–µ–≤—А–µ–љ–љ—Л–є –њ–µ—А–Є–Њ–і –і–ї–Є—В—Б—П –Њ—В –љ–∞—З–∞–ї–∞ –і–Њ –Ї–Њ–љ—Ж–∞ –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П (10вАФ15—Б).
–≠–≤–Њ–ї—О—Ж–Є–Њ–љ–љ—Л–є –њ–µ—А–Є–Њ–і –љ–∞—З–Є–љ–∞–µ—В—Б—П —Б –Љ–Њ–Љ–µ–љ—В–∞ –Њ–Ї–Њ–љ—З–∞–љ–Є—П –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П –і–Њ –њ–Њ–≤–Њ—А–Њ—В–∞ –Ї–Њ—А–∞–±–ї—П –љ–∞ 90вАФ 180¬∞, –Ї–Њ–≥–і–∞ —Б–Є–ї—Л, –і–µ–є—Б—В–≤—Г—О—Й–Є–µ –љ–∞ –Ї–Њ—А–∞–±–ї—М, –њ—А–Є—Е–Њ–і—П—В –≤ —А–∞–≤–љ–Њ–≤–µ—Б–Є–µ. –Я–Њ—Б–ї–µ —Н—В–Њ–≥–Њ –љ–∞—З–Є–љ–∞–µ—В—Б—П –њ–µ—А–Є–Њ–і —Г—Б—В–∞–љ–Њ¬≠–≤–Є–≤—И–µ–є—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є, –Ї–Њ—В–Њ—А—Л–є –њ—А–Њ–і–Њ–ї–ґ–∞–µ—В—Б—П, –њ–Њ–Ї–∞ –љ–µ –±—Г–і–µ—В –Є–Ј–Љ–µ–љ–µ–љ–Њ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —А—Г–ї—П.
–Ъ—А–µ–љ –Ї–Њ—А–∞–±–ї—П –љ–∞ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є
–Я–µ—А–µ–Ї–ї–∞–і–Ї–∞ —А—Г–ї—П –љ–∞ –Ї–Њ—А–∞–±–ї–µ, —Б–ї–µ–і—Г—О—Й–µ–Љ –њ—А—П–Љ–Њ–ї–Є–љ–µ–є–љ—Л–Љ –Ї—Г—А—Б–Њ–Љ, –њ—А–Є–≤–Њ–і–Є—В –Ї –Є—Б–Ї—А–Є–≤–ї–µ–љ–Є—О —В—А–∞–µ–Ї—В–Њ—А–Є–Є –і–≤–Є–ґ–µ¬≠–љ–Є—П –≤ —Б—В–Њ—А–Њ–љ—Г, –Њ–±—А–∞—В–љ—Г—О –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П. –Т —А–µ–Ј—Г–ї—М—В–∞—В–µ –≤–Њ–Ј–љ–Є–Ї–∞–µ—В —Ж–µ–љ—В—А–Њ–±–µ–ґ–љ–∞—П —Б–Є–ї–∞, –Љ–Њ–Љ–µ–љ—В –Ї–Њ—В–Њ—А–Њ–є –≤—Л–Ј—Л–≤–∞–µ—В –љ–µ–±–Њ–ї—М—И–Њ–є –Ї—А–µ–љ –љ–∞ —В–Њ—В –±–Њ—А—В, –Ї—Г–і–∞ –±—Л–ї –њ–µ—А–µ–ї–Њ–ґ–µ–љ —А—Г–ї—М.
–≠—В–Њ—В –Ї—А–µ–љ –Њ–±—Г—Б–ї–Њ–≤–ї–Є–≤–∞–µ—В—Б—П —В–∞–Ї–ґ–µ –Љ–Њ–Љ–µ–љ—В–Њ–Љ –±–Њ–Ї–Њ–≤–Њ–є —Б–Є–ї—Л, –і–µ–є—Б—В–≤—Г—О—Й–µ–є –љ–∞ —А—Г–ї—М. –Я–Њ –Љ–µ—А–µ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –Ї—А–Є–≤–Є–Ј–љ—Л —В—А–∞¬≠–µ–Ї—В–Њ—А–Є–Є —Ж–µ–љ—В—А–Њ–±–µ–ґ–љ–∞—П —Б–Є–ї–∞ —Б–љ–∞—З–∞–ї–∞ —Г–Љ–µ–љ—М—И–∞–µ—В—Б—П, –∞ –Ј–∞—В–µ–Љ —Г–≤–µ–ї–Є—З–Є–≤–∞–µ—В—Б—П. –Я–Њ–і –і–µ–є—Б—В–≤–Є–µ–Љ –Љ–Њ–Љ–µ–љ—В–∞ —Н—В–Њ–є —Б–Є–ї—Л, –њ—А–Є–ї–Њ¬≠–ґ–µ–љ–љ–Њ–є –Ї –¶–Ґ –Ї–Њ—А–∞–±–ї—П, –Ї–Њ—А–∞–±–ї—М –љ–∞—З–Є–љ–∞–µ—В –Ї—А–µ–љ–Є—В—М—Б—П –≤ —Б—В–Њ¬≠—А–Њ–љ—Г, –Њ–±—А–∞—В–љ—Г—О –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—О –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П, –њ—А–Є—З–µ–Љ –њ–µ—А–≤–Њ–µ –љ–∞–Ї–ї–Њ–љ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П —В–µ–Љ –±–Њ–ї—М—И–µ, —З–µ–Љ –±–Њ–ї—М—И–Є–є —Г–≥–Њ–ї –Ї—А–µ–љ–∞ –Њ–љ –Є–Љ–µ–ї –≤ —Б—В–Њ—А–Њ–љ—Г –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П (—А–Є—Б. l.ll).
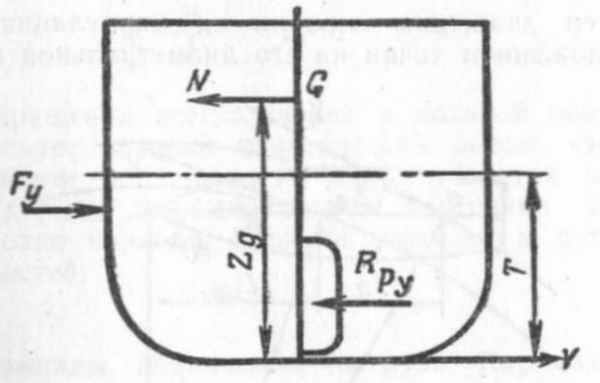
–†–Є—Б. 1.11. –°–Є–ї—Л, –Ї—А–µ–љ—П—Й–Є–µ –Ї–Њ—А–∞–±–ї—М –љ–∞ —Г—Б—В–∞–љ–Њ–≤–Є–≤—И–µ–є—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є
–Ь–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–µ –љ–∞–Ї–ї–Њ–љ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П –≤ —Б—В–Њ—А–Њ–љ—Г, –Њ–±—А–∞—В¬≠–љ—Г—О –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—О –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П, –љ–∞–Ј—Л–≤–∞–µ—В—Б—П –і–Є–љ–∞–Љ–Є¬≠—З–µ—Б–Ї–Є–Љ —Г–≥–ї–Њ–Љ –Ї—А–µ–љ–∞. –Ю–±—Л—З–љ–Њ –і–Є–љ–∞–Љ–Є—З–µ—Б–Ї–Є–є —Г–≥–Њ–ї –Ї—А–µ–љ–∞ –њ—А–µ–≤–Њ—Б—Е–Њ–і–Є—В –Ї—А–µ–љ –љ–∞ —Г—Б—В–∞–љ–Њ–≤–Є–≤—И–µ–є—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –≤ 1,3 2 —А–∞–Ј–∞. –Ь–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ —Г–≥–ї–∞ –Ї—А–µ–љ–∞ –љ–∞ —Г—Б—В–∞¬≠–љ–Њ–≤–Є–≤—И–µ–є—Б—П —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –њ–Њ —Д–Њ—А–Љ—Г–ї–µ –У. –Р. –§–Є—А—Б–Њ–≤–∞:
–У–і–µ V0 вАФ —Б–Ї–Њ—А–Њ—Б—В—М –Ї–Њ—А–∞–±–ї—П –љ–∞ –њ—А—П–Љ–Њ–Љ –Ї—Г—А—Б–µ –і–Њ –љ–∞—З–∞–ї–∞ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є, –Љ/—Б;
T - —Б—А–µ–і–љ—П—П –Њ—Б–∞–і–Ї–∞ –Ї–Њ—А–∞–±–ї—П, –Љ;
h - –љ–∞—З–∞–ї—М–љ–∞—П –њ–Њ–њ–µ—А–µ—З–љ–∞—П –Љ–µ—В–∞—Ж–µ–љ—В—А–Є—З–µ—Б–Ї–∞—П –≤—Л—Б–Њ¬≠—В–∞, –Љ;
L вАФ–і–ї–Є–љ–∞ –Ї–Њ—А–∞–±–ї—П, –Љ; Zg вАФ –Њ—А–і–Є–љ–∞—В–∞ —Ж–µ–љ—В—А–∞ —В—П–ґ–µ—Б—В–Є –Ї–Њ—А–∞–±–ї—П, –Љ. –Ш–Ј —Д–Њ—А–Љ—Г–ї—Л —Б–ї–µ–і—Г–µ—В, —З—В–Њ –≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л—Е —Г—Б–ї–Њ–≤–Є—П—Е –≤—Л¬≠–њ–Њ–ї–љ—П—В—М —Ж–Є—А–Ї—Г–ї—П—Ж–Є—О –љ–∞ –±–Њ–ї—М—И–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –Њ–њ–∞—Б–љ–Њ. –Ю—Б–Њ–±–µ–љ¬≠–љ–Њ –≤–∞–ґ–љ–Њ —Н—В–Њ —Г—З–Є—В—Л–≤–∞—В—М –њ—А–Є –њ–ї–∞–≤–∞–љ–Є–Є –љ–∞ –њ–Њ–њ—Г—В–љ–Њ–Љ –≤–Њ–ї¬≠–љ–µ–љ–Є–Є –Є –њ—А–Є –≤—Л–њ–Њ–ї–љ–µ–љ–Є–Є –њ–Њ–≤–Њ—А–Њ—В–∞ –љ–∞ –≤–µ—В–µ—А.
–¶–µ–љ—В—А –≤—А–∞—Й–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П
–•–∞—А–∞–Ї—В–µ—А –і–≤–Є–ґ–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П –љ–∞ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Њ–њ—А–µ–і–µ¬≠–ї—П–µ—В—Б—П –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ–Љ —В–Њ—З–Ї–Є –љ–∞ –µ–≥–Њ –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, —Г–≥–Њ–ї –і—А–µ–є—Д–∞ –Ї–Њ—В–Њ—А–Њ–є &beta=0.
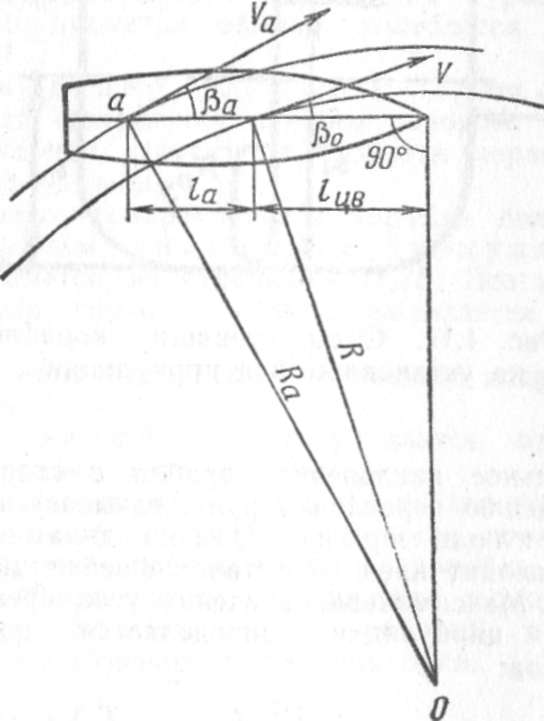
–†–Є—Б. 1.12. –¶–µ–љ—В—А –≤—А–∞—Й–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П
–У–µ–Њ–Љ–µ—В—А–Є—З–µ—Б–Ї–Є –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Н—В–Њ–є —В–Њ—З–Ї–Є –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –њ–µ—А–µ—Б–µ—З–µ–љ–Є–µ–Љ –Ф–Я –Ї–Њ—А–∞–±–ї—П —Б –њ–µ—А–њ–µ–љ¬≠–і–Є–Ї—Г–ї—П—А–Њ–Љ, –Њ–њ—Г—Й–µ–љ–љ—Л–Љ –љ–∞ –љ–µ–µ –Є–Ј —Ж–µ–љ—В—А–∞ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є (—А–Є—Б. 1.12). –≠—В–∞ —В–Њ—З–Ї–∞ –љ–∞–Ј—Л–≤–∞–µ—В—Б—П —Ж–µ–љ—В—А–Њ–Љ –≤—А–∞—Й–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П. –Х–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –њ–Њ –і–ї–Є–љ–µ –Ї–Њ—А–∞–±–ї—П —Е–∞¬≠—А–∞–Ї—В–µ—А–Є–Ј—Г–µ—В—Б—П –Ј–љ–∞—З–µ–љ–Є–µ–Љ L—Ж–≤–≤вАФRβo. –†–∞—Б—Б—В–Њ—П–љ–Є–µ l—Ж–≤, –≤—Л¬≠—А–∞–ґ–µ–љ–љ–Њ–µ –≤ –і–Њ–ї—П—Е –і–ї–Є–љ—Л –Ї–Њ—А–∞–±–ї—П L –њ–Њ –≤–∞—В–µ—А–ї–Є–љ–Є–Є:
–Р–±—Б–Њ–ї—О—В–љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ —Н—В–Њ–є –≤–µ–ї–Є—З–Є–љ—Л –њ—А–Є —Г–≥–ї–∞—Е –њ–µ—А–µ¬≠–Ї–ї–∞–і–Ї–Є —А—Г–ї—П, –њ—А–µ–≤—Л—И–∞—О—Й–Є—Е 20¬∞, –ї–µ–ґ–Є—В –≤ –њ—А–µ–і–µ–ї–∞—Е
–¶–µ–љ—В—А –≤—А–∞—Й–µ–љ–Є—П –≤—Б–µ–≥–і–∞ –ї–µ–ґ–Є—В –≤ –љ–Њ—Б–Њ–≤–Њ–є –Њ–Ї–Њ–љ–µ—З–љ–Њ—Б—В–Є. –Ю—В—Б—О–і–∞ —Б–ї–µ–і—Г–µ—В –≤–∞–ґ–љ—Л–є –њ—А–∞–Ї—В–Є—З–µ—Б–Ї–Є–є –≤—Л–≤–Њ–і, —З—В–Њ —Г–њ—А–∞–≤¬≠–ї–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї–µ–Љ –љ–∞ –њ–Њ–≤–Њ—А–Њ—В–∞—Е –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В—Б—П –њ–µ—А–µ–Љ–µ—Й–µ¬≠–љ–Є–µ–Љ –µ–≥–Њ –Ї–Њ—А–Љ—Л. –≠—В–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ—Б—В–Њ—П–љ–љ–Њ —Г—З–Є—В—Л–≤–∞—В—М –њ—А–Є —И–≤–∞—А—В–Њ–≤–Ї–µ –Ї–Њ—А–∞–±–ї—П, –њ—А–Њ—Е–Њ–і–µ —Г–Ј–Ї–Њ—Б—В–µ–є –Є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ¬≠–љ—Л—Е –Њ–њ–∞—Б–љ–Њ—Б—В–µ–є.
–Ъ–Њ–Љ–∞–љ–і—Л, –њ–Њ–і–∞–≤–∞–µ–Љ—Л–µ –љ–∞ —А—Г–ї—М. –Я–Њ—А—П–і–Њ–Ї –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –њ–Њ–≤–Њ—А–Њ—В–Њ–≤
¬Ђ–Ъ–Њ–Љ–∞–љ–і–Є—А –Ї–Њ—А–∞–±–ї—П –љ–∞–Ј–љ–∞—З–∞–µ—В –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –Ї–Њ—А–∞–±¬≠–ї—П —З–µ—А–µ–Ј –≤–∞—Е—В–µ–љ–љ–Њ–≥–Њ –Њ—Д–Є—Ж–µ—А–∞¬ї(5). –Т –Њ—В–і–µ–ї—М–љ—Л—Е —Б–ї—Г—З–∞—П—Е (–њ—А–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–Є –Љ–∞–љ–µ–≤—А–µ–љ–љ—Л—Е —Н–ї–µ–Љ–µ–љ—В–Њ–≤, –њ–Њ–њ—А–∞–≤–Њ–Ї –њ—А–Є¬≠–±–Њ—А–Њ–≤ –Є –њ–ї–∞–≤–∞–љ–Є–Є –≤ —Г–Ј–Ї–Њ—Б—В–Є) –њ–Њ —А–µ—И–µ–љ–Є—О –Ї–Њ–Љ–∞–љ–і–Є—А–∞ –Ї–Њ¬≠—А–∞–±–ї—П –њ—А–∞–≤–Њ –љ–µ–њ–Њ—Б—А–µ–і—Б—В–≤–µ–љ–љ–Њ–є –њ–Њ–і–∞—З–Є –Ї–Њ–Љ–∞–љ–і—Л –љ–∞ —А—Г–ї—М –Љ–Њ–ґ–µ—В –±—Л—В—М –њ—А–µ–і–Њ—Б—В–∞–≤–ї–µ–љ–Њ —И—В—Г—А–Љ–∞–љ—Г.
–Ф–ї—П —Г—Б–њ–µ—И–љ–Њ–≥–Њ –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –њ–Њ–≤–Њ—А–Њ—В–Њ–≤ —Б –њ–Њ–Љ–Њ—Й—М—О —А—Г–ї—П –Ї–Њ–Љ–∞–љ–і–Є—А—Г –Ї–Њ—А–∞–±–ї—П, —И—В—Г—А–Љ–∞–љ—Г –Є –≤–∞—Е—В–µ–љ–љ–Њ–Љ—Г –Њ—Д–Є—Ж–µ—А—Г –і–Њ–ї–ґ–љ—Л –±—Л—В—М –Є–Ј–≤–µ—Б—В–љ—Л —Б–ї–µ–і—Г—О—Й–Є–µ –і–∞–љ–љ—Л–µ:
вАФ –і–Є–∞–Љ–µ—В—А —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –њ—А–Є –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П –љ–∞ —А–∞–Ј¬≠–ї–Є—З–љ—Л–µ —Г–≥–ї—Л –≤–њ—А–∞–≤–Њ –Є –≤–ї–µ–≤–Њ –њ—А–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —А–µ–ґ–Є–Љ–∞—Е —А–∞¬≠–±–Њ—В—Л –≥–ї–∞–≤–љ—Л—Е –Љ–∞—И–Є–љ;
вАФ –≤—А–µ–Љ—П –Њ–њ–Є—Б–∞–љ–Є—П –њ–Њ–ї–љ–Њ–є —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –Є —З–∞—Б—В–Є –µ–µ –њ—А–Є —А–∞–Ј–ї–Є—З–љ—Л—Е —Б–Ї–Њ—А–Њ—Б—В—П—Е –Є –Ї–Њ–Љ–±–Є–љ–∞—Ж–Є—П—Е —А–∞–±–Њ—В–∞—О—Й–Є—Е –Љ–∞—И–Є–љ;
вАФ –њ–Њ—В–µ—А—П —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –њ—А–Є –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П –љ–∞ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–µ —З–Є—Б–ї–Њ –≥—А–∞–і—Г—Б–Њ–≤ –і–ї—П —А–∞–Ј–ї–Є—З–љ—Л—Е —Б–Ї–Њ—А–Њ¬≠—Б—В–µ–є —Е–Њ–і–∞;
вАФ ¬Ђ–Љ–µ—А—В–≤—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї¬ї –≤—А–µ–Љ–µ–љ–Є –Њ—В –Љ–Њ–Љ–µ–љ—В–∞ –њ–Њ–і–∞—З–Є –Ї–Њ–Љ–∞–љ–і—Л —А—Г–ї–µ–≤–Њ–Љ—Г –і–Њ –љ–∞—З–∞–ї–∞ —Д–∞–Ї—В–Є—З–µ—Б–Ї–Њ–≥–Њ –њ–Њ–≤–Њ—А–Њ—В–∞;
вАФ –≤–Њ–Ј–Љ–Њ–ґ–љ–∞—П –≤–µ–ї–Є—З–Є–љ–∞ —Г–≥–ї–∞ –Ї—А–µ–љ–∞ –Ї–Њ—А–∞–±–ї—П –љ–∞ —Ж–Є—А–Ї—Г¬≠–ї—П—Ж–Є–Є –≤ –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В —Б–Ї–Њ—А–Њ—Б—В–Є —Е–Њ–і–∞.
–Т—Л–њ–Њ–ї–љ—П—П –њ–Њ–≤–Њ—А–Њ—В, —А—Г–Ї–Њ–≤–Њ–і—Б—В–≤—Г—О—В—Б—П —Б–ї–µ–і—Г—О—Й–Є–Љ–Є –њ—А–∞¬≠–≤–Є–ї–∞–Љ–Є:
вАФ –њ–µ—А–µ–і –њ–Њ–і–∞—З–µ–є –Ї–Њ–Љ–∞–љ–і—Л –љ–∞ —А—Г–ї—М –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Њ—Ж–µ¬≠–љ–Є—В—М –Њ–±—Б—В–∞–љ–Њ–≤–Ї—Г –Є –њ—А–Є–љ—П—В—М –≤—Б–µ –Љ–µ—А—Л –і–ї—П –±–µ–Ј–Њ–њ–∞—Б–љ–Њ–≥–Њ –≤—Л¬≠–њ–Њ–ї–љ–µ–љ–Є—П –Љ–∞–љ–µ–≤—А–∞;
вАФ –њ—А–Є–±–µ–≥–∞—В—М –Ї –њ–µ—А–µ–Ї–ї–∞–і–Ї–µ —А—Г–ї—П ¬Ђ–љ–∞ –±–Њ—А—В¬ї —Б–ї–µ–і—Г–µ—В —В–Њ–ї—М–Ї–Њ –≤ —Б–ї—Г—З–∞–µ –Ї—А–∞–є–љ–µ–є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є (–њ—А–Є —А–∞–Ј–≤–Њ—А–Њ—В–µ –Ї–Њ—А–∞–±–ї—П –≤ —Г–Ј–Ї–Њ—Б—В–Є, –і–ї—П –Є–Ј–±–µ–ґ–∞–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П —Б –і—А—Г–≥–Є–Љ –Ї–Њ—А–∞–±–ї–µ–Љ, —Г–Ї–ї–Њ–љ–µ–љ–Є—П –Њ—В –Њ–±–љ–∞—А—Г–ґ–µ–љ–љ–Њ–є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ–Њ–є –Њ–њ–∞—Б–љ–Њ—Б—В–Є –Є –∞—В–∞–Ї –њ—А–Њ—В–Є–≤–љ–Є–Ї–∞);
вАФ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Њ–±–µ—Б–њ–µ—З–Є—В—М –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –±—Л—Б—В—А–Њ–≥–Њ –њ–µ¬≠—А–µ—Е–Њ–і–∞ –љ–∞ –Ј–∞–њ–∞—Б–љ—Л–µ –њ–Њ—Б—В—Л —Г–њ—А–∞–≤–ї–µ–љ–Є—П —А—Г–ї–µ–Љ;
вАФ –њ—А–Є —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–Љ –њ–ї–∞–≤–∞–љ–Є–Є –њ–Њ–≤–Њ—А–Њ—В –Ї–Њ—А–∞–±–ї—П –і–Њ–ї–ґ–µ–љ –±—Л—В—М –Њ–±–Њ–Ј–љ–∞—З–µ–љ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л–Љ —Д–ї–∞–ґ–љ—Л–Љ –Є–ї–Є —Б–≤–µ—В–Њ–≤—Л–Љ —Б–Є–≥–љ–∞–ї–Њ–Љ —Б –Љ–Њ–Љ–µ–љ—В–∞ –њ–Њ–і–∞—З–Є –Ї–Њ–Љ–∞–љ–і—Л –љ–∞ —А—Г–ї—М –і–Њ –Ї–Њ–љ—Ж–∞ –њ–Њ¬≠–≤–Њ—А–Њ—В–∞;
вАФ –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є –Ї—Г—А—Б–∞ –≤ —Б—В—А–Њ—О –Ї–Є–ї—М–≤–∞—В–µ—А–∞ –њ–Њ–≤–Њ—А–Њ—В —Б–ї–µ–і—Г–µ—В –Њ—Б—Г—Й–µ—Б—В–≤–ї—П—В—М —В–∞–Ї, —З—В–Њ–±—Л —Д–Њ—А—И—В–µ–≤–µ–љ—М —И–µ–ї –њ–Њ –≤–љ—Г¬≠—В—А–µ–љ–љ–µ–є –Ї—А–Њ–Љ–Ї–µ –Ї–Є–ї—М–≤–∞—В–µ—А–љ–Њ–є —Б—В—А—Г–Є –≤–њ–µ—А–µ–і–Є –Є–і—Г—Й–µ–≥–Њ –Љ–∞¬≠—В–µ–ї–Њ—В–∞.
–Ъ–Њ–Љ–∞–љ–і—Л –љ–∞ —А—Г–ї—М –і–Њ–ї–ґ–љ—Л –њ–Њ–і–∞–≤–∞—В—М—Б—П –≤ —Б—В—А–Њ–≥–Њ–Љ —Б–Њ–Њ—В¬≠–≤–µ—В—Б—В–≤–Є–Є —Б ¬Ђ–Ъ–Њ–Љ–∞–љ–і–љ—Л–Љ–Є —Б–ї–Њ–≤–∞–Љ–Є¬ї (–њ—А–Є–ї–Њ–ґ–µ–љ–Є–µ –Ї –Ъ–Њ—А–∞¬≠–±–µ–ї—М–љ–Њ–Љ—Г —Г—Б—В–∞–≤—Г –Т–Ь–§). –Я–Њ–і–∞–љ–љ—Л–µ –Ї–Њ–Љ–∞–љ–і—Л —А—Г–ї–µ–≤–Њ–є –Њ–±—П¬≠–Ј–∞–љ —А–µ–њ–µ—В–Њ–≤–∞—В—М –≥—А–Њ–Љ–Ї–Є–Љ –≥–Њ–ї–Њ—Б–Њ–Љ, –њ—А–µ–і–≤–∞—А—П—П –Є—Е —Б–ї–Њ–≤–Њ–Љ ¬Ђ–Х—Б—В—М¬ї.
–Я—А–Є–љ—П—В—Л —Б–ї–µ–і—Г—О—Й–Є–µ –Њ—Б–љ–Њ–≤–љ—Л–µ –Ї–Њ–Љ–∞–љ–і—Л –љ–∞ —А—Г–ї—М:
–Ъ–Њ–Љ–∞–љ–і–∞ ¬Ђ–Я—А–∞–≤–Њ (–ї–µ–≤–Њ) –љ–∞ –±–Њ—А—В¬ї –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ —А—Г–ї—М –і–Њ–ї–ґ–µ–љ –±—Л—В—М –њ–Њ–ї–Њ–ґ–µ–љ –і–Њ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–≥–Њ –њ—А–µ–і–µ–ї–∞ –≤ —Г–Ї–∞¬≠–Ј–∞–љ–љ—Г—О —Б—В–Њ—А–Њ–љ—Г. –Ъ–Њ–Љ–∞–љ–і–∞ –њ–Њ–і–∞–µ—В—Б—П —Б —Г—З–µ—В–Њ–Љ –±—Л—Б—В—А–Њ–є –њ–µ—А–µ–Ї–ї–∞–і–Ї–Є —А—Г–ї—П.
–Я–Њ –Ї–Њ–Љ–∞–љ–і–µ ¬Ђ–Я—А–∞–≤–Њ (–ї–µ–≤–Њ) —А—Г–ї—П¬ї —А—Г–ї–µ–≤–Њ–є –Њ–±—П–Ј–∞–љ –њ–µ¬≠—А–µ–ї–Њ–ґ–Є—В—М —А—Г–ї—М –љ–∞ —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ–Њ–µ —З–Є—Б–ї–Њ –≥—А–∞–і—Г—Б–Њ–≤ (–і–ї—П –і–∞–љ¬≠–љ–Њ–≥–Њ –Ї–Њ—А–∞–±–ї—П) –≤ —Г–Ї–∞–Ј–∞–љ–љ—Г—О —Б—В–Њ—А–Њ–љ—Г –Є –і–Њ–ї–Њ–ґ–Є—В—М: ¬Ђ–†—Г–ї—М –њ—А–∞–≤–Њ (–ї–µ–≤–Њ) —Б—В–Њ–ї—М–Ї–Њ-—В–Њ¬ї. –Т –њ—А–Њ—Ж–µ—Б—Б–µ –≤—Л–њ–Њ–ї–љ–µ–љ–Є—П –њ–Њ–≤–Њ¬≠—А–Њ—В–∞ —А—Г–ї–µ–≤–Њ–є –і–Њ–Ї–ї–∞–і—Л–≤–∞–µ—В —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–µ 10¬∞ –љ–Њ–≤—Л–µ –Ј–љ–∞¬≠—З–µ–љ–Є—П –Ї—Г—А—Б–∞. –≠—В–∞ –Ї–Њ–Љ–∞–љ–і–∞ –њ–Њ–і–∞–µ—В—Б—П –њ—А–Є –≤—Л–њ–Њ–ї–љ–µ–љ–Є–Є –Њ–±—Л—З¬≠–љ—Л—Е –њ–Њ–≤–Њ—А–Њ—В–Њ–≤ –љ–∞ –љ–Њ–≤—Л–є –Ї—Г—А—Б –Є —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–Љ –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞¬≠–љ–Є–Є —Б –Њ–і–љ–Њ—В–Є–њ–љ—Л–Љ–Є –Ї–Њ—А–∞–±–ї—П–Љ–Є.
–Я—А–Є –≤—Л–њ–Њ–ї–љ–µ–љ–Є–Є –њ–Њ–≤–Њ—А–Њ—В–∞ —Б –±–Њ–ї—М—И–Є–Љ –Є–ї–Є –Љ–µ–љ—М—И–Є–Љ, —З–µ–Љ –Њ–±—Л—З–љ–Њ, –і–Є–∞–Љ–µ—В—А–Њ–Љ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є –њ–Њ–і–∞–µ—В—Б—П –Ї–Њ–Љ–∞–љ–і–∞ ¬Ђ–°—В–Њ–ї—М¬≠–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤ –њ—А–∞–≤–Њ (–ї–µ–≤–Њ) —А—Г–ї—П¬ї.
–Ъ–Њ–Љ–∞–љ–і–∞ ¬Ђ–Ю—В–≤–Њ–і–Є—В—М¬ї –њ–Њ–і–∞–µ—В—Б—П –њ—А–Є –њ—А–Є–±–ї–Є–ґ–µ–љ–Є–Є –Ї–Њ—А–∞–±–ї—П –Ї –љ–∞–Ј–љ–∞—З–µ–љ–љ–Њ–Љ—Г –Ї—Г—А—Б—Г (–Њ–±—Л—З–љ–Њ –љ–∞ 10вАФ15¬∞). –Я–Њ —Н—В–Њ–є –Ї–Њ–Љ–∞–љ–і–µ —А—Г–ї—М –Њ—В–≤–Њ–і–Є—В—Б—П –≤ –Ф–Я –Ї–Њ—А–∞–±–ї—П, –њ–Њ—Б–ї–µ —З–µ–≥–Њ —А—Г–ї–µ¬≠–≤–Њ–є –і–Њ–Ї–ї–∞–і—Л–≤–∞–µ—В: ¬Ђ–†—Г–ї—М –њ—А—П–Љ–Њ¬ї. –Р–љ–∞–ї–Њ–≥–Є—З–љ—Л–µ –і–µ–є—Б—В–≤–Є—П –≤—Л–њ–Њ–ї–љ—П—О—В—Б—П –Є –њ–Њ –Ї–Њ–Љ–∞–љ–і–µ ¬Ђ–Я—А—П–Љ–Њ —А—Г–ї—М¬ї. –Ъ–Њ–Љ–∞–љ–і–∞ –њ–Њ¬≠–і–∞–µ—В—Б—П –њ—А–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є –њ—А–µ—А–≤–∞—В—М –≤—Л–њ–Њ–ї–љ–µ–љ–Є–µ –њ–Њ–≤–Њ—А–Њ—В–∞. –Я–Њ—Б–ї–µ –Ї–Њ–Љ–∞–љ–і ¬Ђ–Ю—В–≤–Њ–і–Є—В—М¬ї –Є ¬Ђ–Я—А—П–Љ–Њ —А—Г–ї—М¬ї —А—Г–ї–µ–≤–Њ–є –і–Њ–Ї–ї–∞¬≠–і—Л–≤–∞–µ—В –Ї—Г—А—Б —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–µ 3¬∞.
–Ъ–Њ–Љ–∞–љ–і–∞ ¬Ђ–Ю–і–µ—А–ґ–Є–≤–∞—В—М¬ї –њ–Њ–і–∞–µ—В—Б—П, –Ї–Њ–≥–і–∞ –і–Њ –љ–∞–Ј–љ–∞—З–µ–љ¬≠–љ–Њ–≥–Њ –љ–Њ–≤–Њ–≥–Њ –Ї—Г—А—Б–∞ –Њ—Б—В–∞–ї–Њ—Б—М 3вАФ5¬∞. –Я–Њ —Н—В–Њ–є –Ї–Њ–Љ–∞–љ–і–µ —А—Г–ї—М –њ–µ—А–µ–Ї–ї–∞–і—Л–≤–∞–µ—В—Б—П –љ–∞ –љ–µ–±–Њ–ї—М—И–Њ–µ —З–Є—Б–ї–Њ –≥—А–∞–і—Г—Б–Њ–≤ –≤ —Б—В–Њ—А–Њ–љ—Г, –Њ–±—А–∞—В–љ—Г—О —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є. –†—Г–ї–µ–≤–Њ–є –і–Њ–Ї–ї–∞–і—Л–≤–∞–µ—В –Ї—Г—А—Б –њ–Њ –Ї–Њ–Љ¬≠–њ–∞—Б—Г —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–є –≥—А–∞–і—Г—Б.
–Ъ–Њ–Љ–∞–љ–і–∞ ¬Ђ–Ґ–∞–Ї –і–µ—А–ґ–∞—В—М¬ї –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ —А—Г–ї–µ–≤–Њ–є –і–Њ–ї¬≠–ґ–µ–љ –Ј–∞–Љ–µ—В–Є—В—М –њ–Њ –Ї–Њ–Љ–њ–∞—Б—Г —Б —В–Њ—З–љ–Њ—Б—В—М—О –і–Њ –≥—А–∞–і—Г—Б–∞ –Ї—Г—А—Б, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –ї–µ–ґ–∞–ї –Ї–Њ—А–∞–±–ї—М –≤ –Љ–Њ–Љ–µ–љ—В –њ–Њ–і–∞—З–Є –Ї–Њ–Љ–∞–љ–і—Л, –Є–ї–Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –њ–Њ –±–µ—А–µ–≥–Њ–≤–Њ–Љ—Г –Њ—А–Є–µ–љ—В–Є—А—Г –Є —Г–і–µ—А–ґ–Є–≤–∞—В—М –Ї–Њ¬≠—А–∞–±–ї—М –љ–∞ —Н—В–Њ–Љ –Ї—Г—А—Б–µ, –і–Њ–ї–Њ–ґ–Є–≤: ¬Ђ–Х—Б—В—М, —В–∞–Ї –і–µ—А–ґ–∞—В—М, –љ–∞ —А—Г–Љ–±–µ —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї.
–Ъ–Њ–Љ–∞–љ–і–∞-–Ј–∞–њ—А–Њ—Б ¬Ђ–Э–∞ —А—Г–Љ–±–µ¬ї –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ —А—Г–ї–µ–≤–Њ–є –і–Њ–ї¬≠–ґ–µ–љ –Ј–∞–Љ–µ—В–Є—В—М –Ї—Г—А—Б –њ–Њ –Ї–Њ–Љ–њ–∞—Б—Г –Є –і–Њ–ї–Њ–ґ–Є—В—М: ¬Ђ–Э–∞ —А—Г–Љ–±–µ —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї.
–Ъ–Њ–Љ–∞–љ–і–∞ ¬Ђ–°—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤ –њ—А–∞–≤–Њ (–ї–µ–≤–Њ) –њ–Њ –Ї–Њ–Љ¬≠–њ–∞—Б—Г¬ї –Њ–Ј–љ–∞—З–∞–µ—В, —З—В–Њ —А—Г–ї–µ–≤–Њ–є –і–Њ–ї–ґ–µ–љ –Є–Ј–Љ–µ–љ–Є—В—М –Ї—Г—А—Б –љ–∞ —Г–Ї–∞–Ј–∞–љ–љ–Њ–µ —З–Є—Б–ї–Њ –≥—А–∞–і—Г—Б–Њ–≤, –њ–Њ—Б–ї–µ —З–µ–≥–Њ –і–Њ–ї–Њ–ґ–Є—В—М: ¬Ђ–Э–∞ —А—Г–Љ–±–µ —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї. –Ъ–Њ–Љ–∞–љ–і–∞ –њ–Њ–і–∞–µ—В—Б—П –≤ —Б–ї—Г—З–∞—П—Е, –Ї–Њ–≥–і–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Є–Ј–Љ–µ–љ–Є—В—М –Ї—Г—А—Б –Ї–Њ—А–∞–±–ї—П –љ–µ –±–Њ–ї–µ–µ —З–µ–Љ –љ–∞ 15вАФ25¬∞.
–Ю–њ—Л—В–љ–Њ–Љ—Г —А—Г–ї–µ–≤–Њ–Љ—Г –Љ–Њ–≥—Г—В –±—Л—В—М –њ–Њ–і–∞–љ—Л –Ї–Њ–Љ–∞–љ–і—Л: ¬Ђ–Я—А–∞¬≠–≤–Њ (–ї–µ–≤–Њ) —А—Г–ї—П. –Ъ—Г—А—Б —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї; ¬Ђ–Ф–µ—А–ґ–∞—В—М –≤ –Ї–Є–ї—М–≤–∞—В–µ—А —В–∞–Ї–Њ–Љ—Г-—В–Њ –Ї–Њ—А–∞–±–ї—О¬ї; ¬Ђ–Ы–µ—З—М –љ–∞ —Б—В–≤–Њ—А¬ї; ¬Ђ–Ю—Б—В–∞¬≠–≤–Є—В—М —В–∞–Ї–Њ–є-—В–Њ –њ—А–µ–і–Љ–µ—В —Б–њ—А–∞–≤–∞ (—Б–ї–µ–≤–∞)¬ї –Є —В. –і.
–Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ —А—Г–ї–µ–≤–Њ–є —Б–∞–Љ–Њ—Б—В–Њ—П—В–µ–ї—М–љ–Њ –≤—Л–њ–Њ–ї–љ—П–µ—В —Г–Ї–∞¬≠–Ј–∞–љ–љ—Л–µ –і–µ–є—Б—В–≤–Є—П –Є –і–Њ–Ї–ї–∞–і—Л–≤–∞–µ—В: ¬Ђ–Э–∞ —Б—В–≤–Њ—А–µ. –Э–∞ —А—Г–Љ–±–µ —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї –Є–ї–Є ¬Ђ–Э–∞ —А—Г–Љ–±–µ —Б—В–Њ–ї—М–Ї–Њ-—В–Њ –≥—А–∞–і—Г—Б–Њ–≤¬ї –Є —В. –і.
–Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ
–Т –њ–Њ—Б–ї–µ–і–љ–Є–µ –≥–Њ–і—Л –і–ї—П –∞–≤—В–Њ–Љ–∞—В–Є–Ј–∞—Ж–Є–Є —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Ї–Њ¬≠—А–∞–±–ї–µ–Љ –љ–∞ –Ј–∞–і–∞–љ–љ–Њ–Љ –Ї—Г—А—Б–µ –Њ—Б–љ–Њ–≤–љ—Л–Љ —Б—А–µ–і—Б—В–≤–Њ–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —А—Г–ї–µ–Љ —П–≤–ї—П—О—В—Б—П –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Є–µ —Б—В–∞–±–Є–ї–Є-–Ј–∞—В–Њ—А—Л –Ї—Г—А—Б–∞ (–∞–≤—В–Њ—А—Г–ї–µ–≤—Л–µ). –Р–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Ї—Г—А—Б–Њ–Љ –њ–Њ —Б—А–∞–≤–љ–µ–љ–Є—О —Б —А—Г—З–љ—Л–Љ –Њ–±–ї–µ–≥—З–∞–µ—В —А–∞¬≠–±–Њ—В—Г –≤–∞—Е—В–µ–љ–љ–Њ–≥–Њ —А—Г–ї–µ–≤–Њ–≥–Њ –Є –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –±–Њ–ї–µ–µ —В–Њ—З–љ–Њ–µ —Г–і–µ—А–ґ–∞–љ–Є–µ –Ї–Њ—А–∞–±–ї—П –љ–∞ –Ї—Г—А—Б–µ, —Г–Љ–µ–љ—М—И–∞–µ—В —А—Л—Б–Ї–∞–љ–Є–µ –Є –Њ–±–µ—Б¬≠–њ–µ—З–Є–≤–∞–µ—В –≤—Л–њ–Њ–ї–љ–µ–љ–Є–µ –Ј–∞–і–∞–љ–љ—Л—Е –њ–Њ–≤–Њ—А–Њ—В–Њ–≤. –Я—А–Є–Љ–µ–љ–µ–љ–Є–µ –∞–≤¬≠—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ –њ—А–µ–і—Г—Б–Љ–∞—В—А–Є–≤–∞–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–≥–Њ —Г—Б—В—А–Њ–є—Б—В–≤–∞ –Є–ї–Є —Б–Є—Б—В–µ–Љ—Л –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В–Є –Њ—В –Ј–∞–і–∞—З, –≤—Л–њ–Њ–ї–љ—П–µ–Љ—Л—Е –∞–≤—В–Њ¬≠—А—Г–ї–µ–≤—Л–Љ, –≤–Њ–Ј–Љ–Њ–ґ–љ—Л –і–≤–∞ —А–µ–ґ–Є–Љ–∞ –µ–≥–Њ —А–∞–±–Њ—В—Л.
1. –†–µ–ґ–Є–Љ —Б—В–∞–±–Є–ї–Є–Ј–∞—Ж–Є–Є. –Т —Н—В–Њ–Љ —А–µ–ґ–Є–Љ–µ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–є –і–Њ–ї–ґ–µ–љ –Њ–±–µ—Б–њ–µ—З–Є—В—М –і–≤–Є–ґ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П –љ–∞ –њ—А—П–Љ–Њ–Љ –Ї—Г—А—Б–µ —Б –љ–∞–Є–Љ–µ–љ—М—И–Є–Љ–Є —Г–≥–ї–∞–Љ–Є —А—Л—Б–Ї–∞–љ–Є—П.
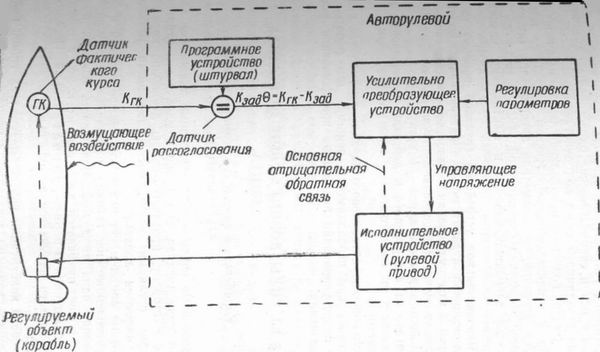
2. –†–µ–ґ–Є–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –Т —Н—В–Њ–Љ —А–µ–ґ–Є–Љ–µ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–є –і–Њ–ї¬≠–ґ–µ–љ –Њ–±–µ—Б–њ–µ—З–Є—В—М –Є–Ј–Љ–µ–љ–µ–љ–Є–µ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П –і–≤–Є–ґ–µ–љ–Є—П –Ї–Њ—А–∞–±–ї—П –≤ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–Є —Б —В—А–µ–±–Њ–≤–∞–љ–Є—П–Љ–Є —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є–Є. –Я—А–Є —Н—В–Њ–Љ –Є–Ј–Љ–µ–љ–µ–љ–Є–µ —Г–≥–ї–∞ –Ї—Г—А—Б–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М –≤—Л–њ–Њ–ї–љ–µ–љ–Њ —Б –Є—Б–њ–Њ–ї—М–Ј–Њ¬≠–≤–∞–љ–Є–µ–Љ –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–≥–Њ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П (–њ–Њ –Ј–∞—А–∞–љ–µ–µ –Ј–∞–і–∞–љ¬≠–љ–Њ–Љ—Г –Ј–∞–Ї–Њ–љ—Г) –Є–ї–Є —Б –њ–Њ–Љ–Њ—Й—М—О —Б–Є—Б—В–µ–Љ—Л –і–Є—Б—В–∞–љ—Ж–Є–Њ–љ–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П. –°–Є—Б—В–µ–Љ–∞ –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Ї—Г—А—Б–Њ–Љ –Њ–±—Л—З–љ–Њ —Б–Њ—Б—В–Њ–Є—В –Є–Ј –Њ–±—К–µ–Ї—В–∞ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П –Є –∞–≤—В–Њ—А—Г¬≠–ї–µ–≤–Њ–≥–Њ (—А–µ–≥—Г–ї—П—В–Њ—А–∞). –Ю–±—К–µ–Ї—В–Њ–Љ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є—П —П–≤–ї—П–µ—В—Б—П –Ї–Њ—А–∞–±–ї—М, —Г–≥–Њ–ї –Ї—Г—А—Б–∞ –Ї–Њ—В–Њ—А–Њ–≥–Њ –Њ –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —А–µ–≥—Г–ї–Є—А—Г–µ¬≠–Љ—Г—О –≤–µ–ї–Є—З–Є–љ—Г, –∞ —Г–≥–Њ–ї –Њ—В–Ї–ї–Њ–љ–µ–љ–Є—П —А—Г–ї—П –∞—А вАФ —Г–њ—А–∞–≤–ї—П—О—Й–µ–µ –≤–Њ–Ј–і–µ–є—Б—В–≤–Є–µ. –§—Г–љ–Ї—Ж–Є–Є –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ –≤—Л–њ–Њ–ї–љ—П–µ—В —Б–њ–µ—Ж–Є–∞–ї—М¬≠–љ–∞—П —Б–ї–µ–і—П—Й–∞—П —Б–Є—Б—В–µ–Љ–∞, –Њ–±–µ—Б–њ–µ—З–Є–≤–∞—О—Й–∞—П –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ —А—Г–ї—П.
–Я—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ –≤–Ї–ї—О—З–∞–µ—В –≤ —Б–µ–±—П —Б–ї–µ–і—Г—О—Й–Є–µ —Н–ї–µ–Љ–µ–љ—В—Л (—А–Є—Б. 1.13):
1. –Ф–∞—В—З–Є–Ї —Д–∞–Ї—В–Є—З–µ—Б–Ї–Њ–≥–Њ –Ї—Г—А—Б–∞ –Ъ–≥–Ї –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Є–Ј¬≠–Љ–µ—А–µ–љ–Є–µ –Ј–љ–∞–Ї–∞ –Є –≤–µ–ї–Є—З–Є–љ—Л —А–∞—Б—Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є—П (–Њ—В–Ї–ї–Њ–љ–µ–љ–Є–µ –Ї—Г—А—Б–∞ –Ї–Њ—А–∞–±–ї—П –Њ—В –Ј–∞–і–∞–љ–љ–Њ–є –≤–µ–ї–Є—З–Є–љ—Л), –∞ —В–∞–Ї–ґ–µ –≤—Л–і–∞—З—Г —Г–њ—А–∞–≤–ї—П—О—Й–µ–≥–Њ —Б–Є–≥–љ–∞–ї–∞. –§—Г–љ–Ї—Ж–Є–Є —З—Г–≤—Б—В–≤–Є—В–µ–ї—М–љ–Њ–≥–Њ —Н–ї–µ–Љ–µ–љ—В–∞ –Њ–±—Л—З–љ–Њ –≤—Л–њ–Њ–ї–љ—П–µ—В –≥–Є—А–Њ–Ї–Њ–Љ–њ–∞—Б.
2. –Я—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ вАФ –і–∞—В—З–Є–Ї –Ј–∞–і–∞–љ–љ–Њ–≥–Њ –Ї—Г—А¬≠—Б–∞ вАФ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –њ—А–Њ–≥—А–∞–Љ–Љ–љ–Њ–µ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Ї—Г—А—Б–Њ–Љ, –Ї–Њ—В–Њ¬≠—А—Л–є –Љ–Њ–ґ–µ—В –±—Л—В—М –Ј–∞–і–∞–љ –≤—А—Г—З–љ—Г—О, –ґ–µ—Б—В–Ї–Њ–є –њ—А–Њ–≥—А–∞–Љ–Љ–Њ–є (–Ј–Є–≥–Ј–∞–≥) –Є–ї–Є –Ї–Њ—А–∞–±–µ–ї—М–љ–Њ–є –≠–¶–Т–Ь.
3. –Ф–∞—В—З–Є–Ї —А–∞—Б—Б–Њ–≥–ї–∞—Б–Њ–≤–∞–љ–Є—П —Б–ї—Г–ґ–Є—В –і–ї—П –≤—Л—А–∞–±–Њ—В–Ї–Є —Б–Є–≥¬≠–љ–∞–ї–Њ–≤ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –њ—А–Є –Њ—В–Ї–ї–Њ–љ–µ–љ–Є–Є –Ї–Њ—А–∞–±–ї—П –Њ—В –Ј–∞–і–∞–љ–љ–Њ–≥–Њ –Ї—Г—А—Б–∞.
4. –£—Б–Є–ї–Є—В–µ–ї—М–љ–Њ-–њ—А–µ–Њ–±—А–∞–Ј—Г—О—Й–µ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ –Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В —Г—Б–Є–ї–µ–љ–Є–µ —Б–Є–≥–љ–∞–ї–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Є –≤—Л—А–∞–±–Њ—В–Ї—Г –Ї–Њ—А—А–µ–Ї—В–Є—А—Г—О—Й–Є—Е —Б–Є–≥–љ–∞–ї–Њ–≤, —Г—З–Є—В—Л–≤–∞—О—Й–Є—Е —Б–Ї–Њ—А–Њ—Б—В—М —Г—Е–Њ–і–∞ –Ї–Њ—А–∞–±–ї—П —Б –Ј–∞¬≠–і–∞–љ–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –Є —Б–Є—Б—В–µ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–µ –Њ–і–љ–Њ—Б—В–Њ—А–Њ–љ–љ–µ–µ —Г–Ї–ї–Њ–љ–µ–љ–Є–µ –Ї–Њ—А–∞–±–ї—П —Б –Ј–∞–і–∞–љ–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –њ–Њ–і –і–µ–є—Б—В–≤–Є–µ–Љ —А–∞–Ј–ї–Є—З–љ—Л—Е —Д–∞–Ї¬≠—В–Њ—А–Њ–≤ (–≤–µ—В–µ—А, –≤–Њ–ї–љ–µ–љ–Є–µ, –њ–∞—А—Ж–Є–∞–ї—М–љ–∞—П —А–∞–±–Њ—В–∞ –Љ–∞—И–Є–љ –Є —В. –і.).
–†–Є—Б. 1.13. –Я—А–Є–љ—Ж–Є–њ–Є–∞–ї—М–љ–∞—П —Б—Е–µ–Љ–∞ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ
–Ю–±—Л—З–љ–Њ –≤ —Г—Б–Є–ї–Є—В–µ–ї—М–љ–Њ-–њ—А–µ–Њ–±—А–∞–Ј—Г—О—Й–µ–Љ —Г—Б—В—А–Њ–є—Б—В–≤–µ –њ—А–µ–і—Г¬≠—Б–Љ–Њ—В—А–µ–љ–∞ —А–µ–≥—Г–ї–Є—А–Њ–≤–Ї–∞ –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ (—З—Г–≤—Б—В–≤–Є¬≠—В–µ–ї—М–љ–Њ—Б—В–Є, –Ї–Њ—Н—Д—Д–Є—Ж–Є–µ–љ—В–∞ –Њ–±—А–∞—В–љ–Њ–є —Б–≤—П–Ј–Є –Є —В. –і.) –њ–Њ –Љ–∞¬≠–љ–µ–≤—А–µ–љ–љ—Л–Љ —Н–ї–µ–Љ–µ–љ—В–∞–Љ –Ї–Њ—А–∞–±–ї—П –Є —Д–∞–Ї—В–Є—З–µ—Б–Ї–Є–Љ —Г—Б–ї–Њ–≤–Є—П–Љ –њ–ї–∞–≤–∞–љ–Є—П.
5. –Ш—Б–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–µ —Г—Б—В—А–Њ–є—Б—В–≤–Њ (—А—Г–ї–µ–≤–Њ–є –њ—А–Є–≤–Њ–і) –Є–Љ–µ–µ—В –і–∞—В—З–Є–Ї –Њ—Б–љ–Њ–≤–љ–Њ–є –Њ—В—А–Є—Ж–∞—В–µ–ї—М–љ–Њ–є –Њ–±—А–∞—В–љ–Њ–є —Б–≤—П–Ј–Є, –њ—А–µ–і–љ–∞–Ј¬≠–љ–∞—З–µ–љ–љ—Л–є –і–ї—П —Г–ї—Г—З—И–µ–љ–Є—П –Ї–∞—З–µ—Б—В–≤–∞ –∞–≤—В–Њ–Љ–∞—В–Є—З–µ—Б–Ї–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П —А—Г–ї–µ–Љ (–Њ–±–µ—Б–њ–µ—З–Є–≤–∞–µ—В –Ј–∞—В—Г—Е–∞–љ–Є–µ –Ї–Њ–ї–µ–±–∞–љ–Є–є –Ї–Њ¬≠—А–∞–±–ї—П –Њ–Ї–Њ–ї–Њ –Ј–∞–і–∞–љ–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ вАФ –Ъ–Ј–∞–і).
–Я–Њ–і–≥–Њ—В–Њ–≤–Ї–∞ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ –Ї –і–µ–є—Б—В–≤–Є—О –Є –≤–Ї–ї—О—З–µ–љ–Є–µ –µ–≥–Њ –њ—А–Њ–Є–Ј–≤–Њ–і—П—В—Б—П –≤ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–Є —Б —Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є–Њ–љ–љ—Л–Љ–Є –Є–љ¬≠—Б—В—А—Г–Ї—Ж–Є—П–Љ–Є.
–Ю–±—Б–ї—Г–ґ–Є–≤–∞–љ–Є–µ –∞–≤—В–Њ—А—Г–ї–µ–≤–Њ–≥–Њ –љ–∞ —Е–Њ–і—Г –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ –њ–µ¬≠—А–µ–Ї–ї—О—З–µ–љ–Є–Є –њ—А–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є —А–µ–ґ–Є–Љ–Њ–≤ –µ–≥–Њ —А–∞–±–Њ—В—Л, –∞ —В–∞–Ї–ґ–µ –њ–Њ–і—А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є–Є –њ–∞—А–∞–Љ–µ—В—А–Њ–≤ –њ—А–Є –Є–Ј–Љ–µ–љ–µ–љ–Є–Є —Г—Б–ї–Њ¬≠–≤–Є–є –њ–ї–∞–≤–∞–љ–Є—П.
(1) –Ъ –≥–ї–∞–≤–љ—Л–Љ —Б—А–µ–і—Б—В–≤–∞–Љ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Љ–Њ–≥—Г—В –±—Л—В—М –Њ—В–љ–µ—Б–µ–љ—Л —В–∞–Ї–ґ–µ –Ї—А—Л–ї—М—З–∞—В—Л–µ –і–≤–Є–ґ–Є—В–µ–ї–Є (–Ъ–Ф), –њ—А–Є–љ—Ж–Є–њ –і–µ–є—Б—В–≤–Є—П –Ї–Њ—В–Њ—А—Л—Е —А–∞—Б—Б–Љ–∞¬≠—В—А–Є–≤–∞–µ—В—Б—П –≤ ¬І 1.9.
(2) –Я–Њ–ї—Г–њ–Њ–і–≤–µ—Б–љ—Л–µ –±–∞–ї–∞–љ—Б–Є—А–љ—Л–µ —А—Г–ї–Є –љ–∞–Ј—Л–≤–∞—О—В—Б—П –њ–Њ–ї—Г–±–∞–ї–∞–љ—Б–Є—А–љ—Л–Љ–Є.
(3) –Я–Њ –њ—А–Є–љ—Ж–Є–њ—Г –і–µ–є—Б—В–≤–Є—П –Є —Е–∞—А–∞–Ї—В–µ—А—Г –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—П –≤—Б–њ–Њ–Љ–Њ–≥–∞¬≠—В–µ–ї—М–љ—Л–µ —Б—А–µ–і—Б—В–≤–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—П –Њ—В–љ–Њ—Б—П—В—Б—П –Ї —Б—А–µ–і—Б—В–≤–∞–Љ –∞–Ї—В–Є–≤–љ–Њ–≥–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є—П (–°–Р–£).
(4) –Я–Њ–ї–Њ–ґ–µ–љ–Є–µ —Ж–µ–љ—В—А–∞ –і–∞–≤–ї–µ–љ–Є—П –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Љ–µ—Б—В–Њ–Љ –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П —А–∞–≤–љ–Њ–і–µ–є—Б—В–≤—Г—О—Й–µ–є —Б –њ–ї–Њ—Б–Ї–Њ—Б—В—М—О —Б–Є–Љ–Љ–µ—В—А–Є–Є —А—Г–ї—П.
(5) –Ъ–£-59 (–Т–Њ–µ–љ–Є–Ј–і–∞—В, 1967), —Б—В. 830. 2вАФ17
–Т–њ–µ—А–µ–і
–Ю–≥–ї–∞–≤–ї–µ–љ–Є–µ
–Э–∞–Ј–∞–і
|
|
–У–ї–∞–≤–љ–Њ–µ –Ј–∞ –љ–µ–і–µ–ї—О
|







 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ