–С–∞–љ–љ–µ—А

–Ъ–∞–Ї —Б–Њ–≤–Љ–µ—Б—В–Є—В—М –Љ–µ—Е–∞–љ–Њ–Њ–±—А–∞–±–Њ—В–Ї—Г –Є –∞–≤—В–Њ–Љ–∞—В–Є–Ј–∞—Ж–Є—О –њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–∞
|
¬І 41. –Ю–Я–†–Х–Ф–Х–Ы–Х–Э–Ш–Х –Ь–Р–Э–Х–Т–†–Х–Э–Э–Ђ–• –≠–Ы–Х–Ь–Х–Э–Ґ–Ю–Т –°–£–Ф–Ю–Т
–°–Њ–≤—А–µ–Љ–µ–љ–љ—Л–µ –†–Ы–° –і–∞—О—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М —Б—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—О –љ–µ —В–Њ–ї—М–Ї–Њ –Њ—Б—Г—Й–µ—Б—В–≤–ї—П—В—М –Њ–±—Й—Г—О –Њ—А–Є–µ–љ—В–Є—А–Њ–≤–Ї—Г –Є –Њ–њ—А–µ–і–µ–ї—П—В—М –Љ–µ—Б—В–Њ–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—Г–і–љ–∞
–Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –Њ—А–Є–µ–љ—В–Є—А–Њ–≤, –љ–Њ –Є –Њ–њ—А–µ–і–µ–ї—П—В—М —Б–Ї–Њ—А–Њ—Б—В—М, –њ–Њ–њ—А–∞–≤–Ї—Г –ї–∞–≥–∞,
—Н–ї–µ–Љ–µ–љ—В—Л —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞, –∞ —В–∞–Ї–ґ–µ —Н–ї–µ–Љ–µ–љ—В—Л –і–≤–Є–ґ–µ–љ–Є—П
–≤—Б—В—А–µ—З–љ—Л—Е —Б—Г–і–Њ–≤.
–Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є –Є –њ–Њ–њ—А–∞–≤–Ї–Є –ї–∞–≥–∞. –°–Ї–Њ—А–Њ—Б—В—М –Є –њ–Њ–њ—А–∞–≤–Ї–Є –ї–∞–≥–∞ –Њ–њ—А–µ–і–µ–ї—П—О—В —В–∞–Ї –ґ–µ, –Ї–∞–Ї –Є –љ–∞ –Љ–µ—А–љ–Њ–є –ї–Є–љ–Є–Є, –љ–Њ –љ–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ –Њ—В —Г—Б–ї–Њ–≤–Є–є –≤–Є–і–Є–Љ–Њ—Б—В–Є. –Ь–µ—Б—В–Њ, –≥–і–µ –±—Г–і—Г—В —Н—В–Њ –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—М, –і–Њ–ї–ґ–љ–Њ —Г–і–Њ–≤–ї–µ—В–≤–Њ—А—П—В—М —В—А–µ–±–Њ–≤–∞–љ–Є—П–Љ, –њ—А–µ–і—К—П–≤–ї—П–µ–Љ—Л–Љ –Ї –Љ–µ—Б—В—Г —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є—П –Љ–µ—А–љ–Њ–є
–ї–Є–љ–Є–Є, –∞ –≤–Љ–µ—Б—В–Њ —Б—В–≤–Њ—А–Њ–≤ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Є–Љ–µ—В—М –ї–Є—И—М –±—Г–є —Б –њ–∞—Б—Б–Є–≤–љ—Л–Љ –Њ—В—А–∞–ґ–∞—В–µ–ї–µ–Љ –Є–ї–Є —Б—Г–і–љ–Њ, —Б—В–Њ—П—Й–µ–µ –љ–∞ —П–Ї–Њ—А–µ. –Ф–ї—П —А–∞–±–Њ—В—Л –і–Њ–ї–ґ–љ—Л –±—Л—В—М –≤—Л–і–µ–ї–µ–љ—Л –љ–∞–±–ї—О–і–∞—В–µ–ї–Є вАФ –Њ–і–Є–љ —Г –Ш–Ъ–Ю –†–Ы–°, –≤—В–Њ—А–Њ–є —Г —В–∞—Е–Њ–Љ–µ—В—А–Њ–≤ –Є —В—А–µ—В–Є–є вАФ —Г —Б—З–µ—В—З–Є–Ї–∞ –ї–∞–≥–∞. –Т—Б–µ —В—А–Є –љ–∞–±–ї—О–і–∞—В–µ–ї—П –і–Њ–ї–ґ–љ—Л –Є–Љ–µ—В—М —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А—Л.
–°—Г–і–љ–Њ –њ—А–Њ–≤–Њ–і—П—В –њ—А–Њ—В–Є–≤ –≤–µ—В—А–∞ –Є–ї–Є —В–µ—З–µ–љ–Є—П –Ї—Г—А—Б–Њ–Љ –њ—А—П–Љ–Њ –љ–∞ –±—Г–є
(—Б—В–Њ—П—Й–µ–µ —Б—Г–і–љ–Њ) –Є –Љ–∞—И–Є–љ–∞–Љ –Ј–∞–і–∞—О—В –љ—Г–ґ–љ—Л–є —А–µ–ґ–Є–Љ —А–∞–±–Њ—В—Л. –Я–Њ–і–≤–Є–ґ–љ—Л–є –Ї—А—Г–≥ –і–∞–ї—М–љ–Њ—Б—В–Є (–Я–Ъ–Ф) –љ–∞ –Ш–Ъ–Ю –Є–ї–Є –Љ–∞—Б—И—В–∞–±–љ—Г—О –ї–Є–љ–µ–є–Ї—Г –љ–∞
–≤–Є–Ј–Є—А–µ –њ—А–Є –љ–µ–њ–Њ–і–≤–Є–ґ–љ–Њ–Љ –Ї—А—Г–≥–µ –і–∞–ї—М–љ–Њ—Б—В–Є (–Э–Ъ–Ф) —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –љ–∞
–Ј–∞—А–∞–љ–µ–µ –љ–∞–Љ–µ—З–µ–љ–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –±—Г—П, –Ї–Њ—В–Њ—А–Њ–µ –і–Њ–ї–ґ–љ–Њ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Њ–≤–∞—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ–љ–Њ–Љ—Г —А–∞—Б—Б—В–Њ—П–љ–Є—О –і–Њ –±—Г—П,
–љ–∞–њ—А–Є–Љ–µ—А 4 –Є–ї–Є 6 –Љ–Є–ї—П–Љ, –љ–Њ —В–∞–Ї, —З—В–Њ–±—Л –Ї –Љ–Њ–Љ–µ–љ—В—Г –њ—А–Є—Е–Њ–і–∞ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞
–±—Г—П –Ї –Я–Ъ–Ф (–Љ–∞—Б—И—В–∞–±–љ–Њ–є –ї–Є–љ–µ–є–Ї–Є –Э–Ъ–Ф) —Б—Г–і–љ–Њ –Є–Љ–µ–ї–Њ —Г—Б—В–∞–љ–Њ–≤–Є–≤—И—Г—О—Б—П
—Б–Ї–Њ—А–Њ—Б—В—М –њ—А–Є –Ј–∞–і–∞–љ–љ–Њ–Љ —А–µ–ґ–Є–Љ–µ —А–∞–±–Њ—В—Л –Љ–∞—И–Є–љ. –Т –Љ–Њ–Љ–µ–љ—В, –Ї–Њ–≥–і–∞ —Н—Е–Њ-
—Б–Є–≥–љ–∞–ї –±—Г—П –љ–∞ –Ш–Ъ–Ю –Ї–Њ—Б–љ–µ—В—Б—П –Я–Ъ–Ф (–Њ—В—Б—З–µ—В–∞ –Љ–∞—Б—И—В–∞–±–љ–Њ–є –ї–Є–љ–µ–є–Ї–Є
–Э–Ъ–Ф), –≤—Б–µ –љ–∞–±–ї—О–і–∞—В–µ–ї–Є –њ–Њ —Б–Є–≥–љ–∞–ї—Г –њ—Г—Б–Ї–∞—О—В —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А—Л, –Ј–∞–њ–Є—Б—Л–≤–∞—О—В —З–Є—Б–ї–Њ –Њ–±–Њ—А–Њ—В–Њ–≤ –і–≤–Є–ґ–Є—В–µ–ї—П –Є –њ–Њ–Ї–∞–Ј–∞–љ–Є–µ –ї–∞–≥–∞. –°—А–∞–Ј—Г –ґ–µ –њ–Њ—Б–ї–µ
—Н—В–Њ–≥–Њ –Я–Ъ–Ф (–Љ–∞—Б—И—В–∞–±–љ–∞—П –ї–Є–љ–µ–є–Ї–∞ –Э–Ъ–Ф) —Г—Б—В–∞–љ–∞–≤–ї–Є–≤–∞–µ—В—Б—П –≤ –љ–Њ–≤–Њ–µ,
–Љ–µ–љ—М—И–µ –њ–µ—А–≤–Њ–≥–Њ –љ–∞ 1вАФ3 –Љ–Є–ї–Є, –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞
–±—Г—П, –љ–Њ –≤ –Љ–∞—Б—И—В–∞–±–µ —В–Њ–є –ґ–µ —И–Ї–∞–ї—Л –і–∞–ї—М–љ–Њ—Б—В–Є.
–†–Є—Б. 105
–Э–∞–њ—А–∞–≤–ї—П—П —Б—Г–і–љ–Њ, –Ї–∞–Ї –Љ–Њ–ґ–љ–Њ —В–Њ—З–љ–µ–µ, –њ—А—П–Љ–Њ –љ–∞ –±—Г–є –≤ –Љ–Њ–Љ–µ–љ—В,
–Ї–Њ–≥–і–∞ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї –њ–Њ–і–Њ–є–і–µ—В –Ї –Я–Ъ–Ф –≤—В–Њ—А–Є—З–љ–Њ (–Ї –Њ—В—Б—З–µ—В—Г –љ–∞ –Љ–∞—Б—И—В–∞–±–љ–Њ–є –ї–Є–љ–µ–є–Ї–µ –Э–Ъ–Ф) , —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А—Л –Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В, –Ј–∞–њ–Є—Б—Л–≤–∞—О—В —З–Є—Б–ї–Њ
–Њ–±–Њ—А–Њ—В–Њ–≤ –і–≤–Є–ґ–Є—В–µ–ї—П –Є –Њ—В—Б—З–µ—В –ї–∞–≥–∞.
–†–∞–Ј–љ–Њ—Б—В—М —Г—Б—В–∞–љ–Њ–≤–Њ–Ї –Я–Ъ–Ф (–Њ—В—Б—З–µ—В–Њ–≤ –Љ–∞—Б—И—В–∞–±–љ–Њ–є –ї–Є–љ–µ–є–Ї–Є –Э–Ъ–Ф)
–і–∞—Б—В —А–∞—Б—Б—В–Њ—П–љ–Є–µ 5, –њ—А–Њ–є–і–µ–љ–љ–Њ–µ —Б—Г–і–љ–Њ–Љ –Ј–∞ —Б—А–µ–і–љ–Є–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –Ґ, –Њ–њ—А–µ–і–µ–ї—П–µ–Љ—Л–є –њ–Њ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П–Љ —В—А–µ—Е —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А–Њ–≤, –∞ —А–∞–Ј–љ–Њ—Б—В—М
–Њ—В—Б—З–µ—В–Њ–≤ –ї–∞–≥–Њ–≤ (–Њ–ї2 вАФ –Њ–ї1) –і–∞–µ—В —А–Њ–ї. –Ю–±–Њ—А–Њ—В—Л –і–≤–Є–ґ–Є—В–µ–ї–µ–є, –µ—Б–ї–Є –±—Л–ї–Є
–Ј–∞–Љ–µ—З–µ–љ—Л –Є–Ј–Љ–µ–љ–µ–љ–Є—П, –љ—Г–ґ–љ–Њ –њ—А–Є–≤–µ—Б—В–Є –Ї —Б—А–µ–і–љ–Є–Љ.
–Р–љ–∞–ї–Њ–≥–Є—З–љ–Њ –њ—А–Њ–Є–Ј–≤–Њ–і—П—В –љ–∞–±–ї—О–і–µ–љ–Є—П –љ–∞ –≤—В–Њ—А–Њ–Љ –≥–∞–ї—Б–µ, –њ—А–Є–≤–µ–і—П
—Н—Е–Њ-—Б–Є–≥–љ–∞–ї –±—Г—П –њ—А—П–Љ–Њ –њ–Њ –Ї–Њ—А–Љ–µ.
–Ъ–Њ–≥–і–∞ —Б—Г–і–љ–Њ –њ—А–Њ–є–і–µ—В –і–≤—Г–Љ—П-—В—А–µ–Љ—П –≥–∞–ї—Б–∞–Љ–Є –њ—А–Є –Ї–∞–ґ–і–Њ–Љ –Ј–∞–і–∞–љ–љ–Њ–Љ
—А–µ–ґ–Є–Љ–µ —А–∞–±–Њ—В—Л –Љ–∞—И–Є–љ –љ–∞ –Ї–∞–ґ–і–Њ–Љ –Є–Ј –љ–Є—Е –Њ–њ—А–µ–і–µ–ї—П—О—В S, t –Є —А–Њ–ї, –њ–Њ
—Д–Њ—А–Љ—Г–ї–∞–Љ (18) вАФ (26–∞) —А–∞—Б—Б—З–Є—В—Л–≤–∞—О—В —Б–Ї–Њ—А–Њ—Б—В—М —Б—Г–і–љ–∞, –њ–Њ–њ—А–∞–≤–Ї—Г –ї–∞–≥–∞
–Є —Б–Њ—Б—В–∞–≤–ї—П—О—В —В–∞–±–ї–Є—Ж—Г —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є —Е–Њ–і–∞ –Њ–±–Њ—А–Њ—В–∞–Љ –і–≤–Є–ґ–Є—В–µ–ї–µ–є .
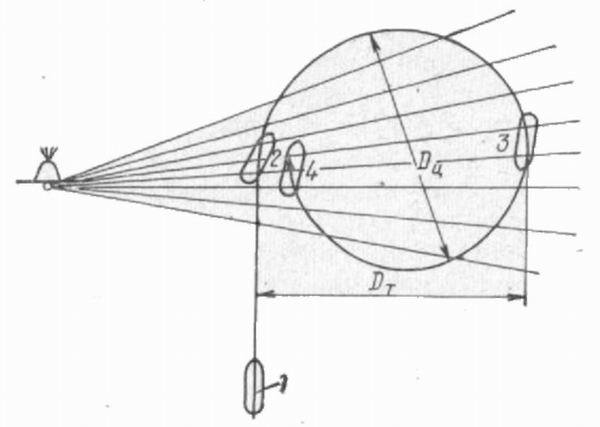
–Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ —Н–ї–µ–Љ–µ–љ—В–Њ–≤ —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є. –Э–∞ —В—А–∞–≤–µ—А–Ј–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞
–±—Г—П (—А–Є—Б. 105) –њ–µ—А–µ–Ї–ї–∞–і—Л–≤–∞—О—В —А—Г–ї—М –љ–∞ –Ј–∞–і–∞–љ–љ—Л–є —Г–≥–Њ–ї –≤–њ—А–∞–≤–Њ, –≤–Ї–ї—О—З–∞—О—В –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ —В—А–Є —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А–∞, –Є–Ј–Љ–µ—А—П—О—В –њ–Њ –†–Ы–° —А–∞—Б—Б—В–Њ—П–љ–Є–µ
–і–Њ –±—Г—П –Є –Ї—Г—А—Б–Њ–≤–Њ–є —Г–≥–Њ–ї, –Ј–∞–Љ–µ—З–∞—О—В –Ї—Г—А—Б —Б—Г–і–љ–∞ –њ–Њ –Ї–Њ–Љ–њ–∞—Б—Г. –Ъ–Њ–≥–і–∞
—Б—Г–і–љ–Њ –љ–∞—З–љ–µ—В –њ–Њ–≤–Њ—А–Њ—В –≤–њ—А–∞–≤–Њ, –Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –Њ–і–Є–љ –Є–Ј —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А–Њ–≤
–Є –њ–Њ –µ–≥–Њ –Њ—В—Б—З–µ—В—Г —Г–Ј–љ–∞—О—В –≤–µ–ї–Є—З–Є–љ—Г ¬Ђ–Љ–µ—А—В–≤–Њ–≥–Њ –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–∞¬ї (–љ–∞ —А–Є—Б. 105
—В–Њ—З–Ї–∞ 2). –Ф–∞–ї–µ–µ —З–µ—А–µ–Ј –Ї–∞–ґ–і—Л–µ 15вАФ20 —Б–µ–Ї –њ–Њ –†–Ы–° –Њ–њ—А–µ–і–µ–ї—П—О—В —А–∞—Б—Б—В–Њ—П–љ–Є—П, –Ї—Г—А—Б–Њ–≤—Л–µ —Г–≥–ї—Л –Є –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Ј–∞–Љ–µ—З–∞—О—В –Ъ–Ъ, –≤–µ–і—П –Ј–∞–њ–Є—Б–Є —Н—В–Є—Е
–і–∞–љ–љ—Л—Е, –∞ —В–∞–Ї–ґ–µ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А–Њ–≤ –Њ—В –љ–∞—З–∞–ї–∞ –љ–∞–±–ї—О–і–µ–љ–Є–є –і–Њ
–њ–Њ–≤–Њ—А–Њ—В–∞, –љ–∞ 360¬∞. –Ъ–Њ–≥–і–∞ —Б—Г–і–љ–Њ –њ—А–Є–і–µ—В –љ–∞ –Њ–±—А–∞—В–љ—Л–є –Ї—Г—А—Б (—В–Њ—З–Ї–∞ 3),
–Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –µ—Й–µ –Њ–і–Є–љ —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А. –Я–Њ –µ–≥–Њ –њ–Њ–Ї–∞–Ј–∞–љ–Є—П–Љ –Њ–њ—А–µ–і–µ–ї—П—О—В
–њ–Њ–ї—Г–њ–µ—А–Є–Њ–і —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є. –Т –Љ–Њ–Љ–µ–љ—В –њ—А–Є—Е–Њ–і–∞ —Б—Г–і–љ–∞ –љ–∞ –њ–µ—А–≤–Њ–љ–∞—З–∞–ї—М–љ—Л–є
–Ї—Г—А—Б (—В–Њ—З–Ї–∞ 4) –Њ—Б—В–∞–љ–∞–≤–ї–Є–≤–∞—О—В –њ–Њ—Б–ї–µ–і–љ–Є–є —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А, –Ї–Њ—В–Њ—А—Л–є –њ–Њ–Ї–∞–ґ–µ—В –њ–µ—А–Є–Њ–і —Ж–Є—А–Ї—Г–ї—П—Ж–Є–Є. (–Я—А–Є —Е–Њ—А–Њ—И–µ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є, –≤–Љ–µ—Б—В–Њ –Ї—Г—А—Б–Њ–≤—Л—Е
—Г–≥–ї–Њ–≤ –њ–Њ –†–Ы–° –Є –Ї–Њ–Љ–њ–∞—Б–љ—Л—Е –Ї—Г—А—Б–Њ–≤, –≤ –Љ–Њ–Љ–µ–љ—В –Є–Ј–Љ–µ—А–µ–љ–Є—П —А–∞—Б—Б—В–Њ—П–љ–Є–є
–њ–Њ –†–Ы–° –і–Њ –±—Г—П, –±–µ—А—Г—В –Ю–Ъ–Я).
–Я–Њ –≤–Ј—П—В—Л–Љ –Ъ–£ –Є –Ъ–Ъ —А–∞—Б—Б—З–Є—В—Л–≤–∞—О—В –Ъ–Я, –Ј–∞—В–µ–Љ –њ–Њ –Ъ–Я –Є–ї–Є –Ю–Ъ–Я –Є
–Є–Ј–Љ–µ—А–µ–љ–љ—Л–Љ —А–∞—Б—Б—В–Њ—П–љ–Є—П–Љ –љ–∞ –Љ–Є–ї–ї–Є–Љ–µ—В—А–Њ–≤–Њ–є –±—Г–Љ–∞–≥–µ –Є–ї–Є —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–Љ
–њ–ї–∞–љ—И–µ—В–µ –≤—Л—З–µ—А—З–Є–≤–∞—О—В —Ж–Є—А–Ї—Г–ї—П—Ж–Є—О.
–Ф–ї—П —Н—В–Њ–≥–Њ –љ–∞ –њ–ї–∞–љ—И–µ—В–µ –њ—А–Є–љ–Є–Љ–∞—О—В –љ–µ–Ї–Њ—В–Њ—А—Г—О —В–Њ—З–Ї—Г –Ј–∞ –Љ–µ—Б—В–Њ –љ–∞—Е–Њ–ґ–і–µ–љ–Є—П –±—Г—П, –Њ—В –љ–µ–µ –њ—А–Њ–≤–Њ–і—П—В –ї–Є–љ–Є–Є –Ъ–Я –Є –љ–∞ –љ–Є—Е –Њ—В–Ї–ї–∞–і—Л–≤–∞—О—В –≤
–≤—Л–±—А–∞–љ–љ–Њ–Љ –Љ–∞—Б—И—В–∞–±–µ –Є–Ј–Љ–µ—А–µ–љ–љ—Л–µ —А–∞—Б—Б—В–Њ—П–љ–Є—П. –Я–Њ—Б–ї–µ —З–µ–≥–Њ, —Б–Њ–µ–і–Є–љ–Є–≤
–≤—Б–µ —В–Њ—З–Ї–Є –љ–∞ –ї–Є–љ–Є—П—Е –Ъ–Я –њ–ї–∞–≤–љ–Њ–є –Ї—А–Є–≤–Њ–є, –њ–Њ–ї—Г—З–∞—О—В —Ж–Є—А–Ї—Г–ї—П—Ж–Є—О
—Б—Г–і–љ–∞, –њ–Њ –Ї–Њ—В–Њ—А–Њ–є —Б–љ–Є–Љ–∞—О—В DT D—Ж –Є –Њ–њ—А–µ–і–µ–ї—П—О—В –і—А—Г–≥–Є–µ –µ–µ —Н–ї–µ–Љ–µ–љ—В—Л.
–≠–ї–µ–Љ–µ–љ—В—Л –і–≤–Є–ґ–µ–љ–Є—П –≤—Б—В—А–µ—З–љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Њ–њ—А–µ–і–µ–ї—П—О—В –≥—А–∞—Д–Є—З–µ—Б–Ї–Є–Љ
–њ–Њ—Б—В—А–Њ–µ–љ–Є–µ–Љ –љ–∞ –Ї–∞—А—В–µ, –±—Г–Љ–∞–≥–µ –Є–ї–Є –љ–∞ —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–Љ –њ–ї–∞–љ—И–µ—В–µ. –Ю–њ—А–µ–і–µ–ї—П—О—В –Ї—Г—А—Б –≤—Б—В—А–µ—З–љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Є –µ–≥–Њ —Б–Ї–Њ—А–Њ—Б—В—М –њ–Њ –Є–Ј–Љ–µ—А–µ–љ–љ—Л–Љ —З–µ—А–µ–Ј
–Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–µ –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Є –≤—А–µ–Љ–µ–љ–Є –њ–µ–ї–µ–љ–≥–∞–Љ –Є —А–∞—Б—Б—В–Њ—П–љ–Є—П–Љ –і–Њ
—Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –љ–∞ —Н–Ї—А–∞–љ–µ –Ш–Ъ–Ю –њ—А–Є –Є–Ј–≤–µ—Б—В–љ—Л—Е –Ї—Г—А—Б–µ (–Є–ї–Є –њ—Г—В–Є) –Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞, —Б –Ї–Њ—В–Њ—А–Њ–≥–Њ –≤–µ–і—Г—В –љ–∞–±–ї—О–і–µ–љ–Є—П.
–Я—А–Њ–і–Њ–ї–ґ–Є—В–µ–ї—М–љ–Њ—Б—В—М –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Њ–≤ –≤—А–µ–Љ–µ–љ–Є –Љ–µ–ґ–і—Г –Є–Ј–Љ–µ—А–µ–љ–Є—П–Љ–Є
–њ–µ–ї–µ–љ–≥–Њ–≤ –Є —А–∞—Б—Б—В–Њ—П–љ–Є–є –і–Њ –≤—Б—В—А–µ—З–љ–Њ–≥–Њ —Б—Г–і–љ–∞ –±—Г–і–µ—В –Ј–∞–≤–Є—Б–µ—В—М –Њ—В —А–∞—Б—Б—В–Њ—П–љ–Є—П, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –љ–∞—Е–Њ–і–Є—В—Б—П –Њ–і–љ–Њ —Б—Г–і–љ–Њ –Њ—В –і—А—Г–≥–Њ–≥–Њ, –Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б–±–ї–Є–ґ–µ–љ–Є—П, –∞ —В–Њ—З–љ–Њ—Б—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П вАФ –Њ—В —З–Є—Б–ї–∞ –љ–∞–±–ї—О–і–µ–љ–Є–є. –Я—А–Є –Љ–∞–ї—Л—Е
—А–∞—Б—Б—В–Њ—П–љ–Є—П—Е –Є –±–Њ–ї—М—И–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є —Б–±–ї–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–µ–љ–Є—П –њ—А–Њ–≤–Њ–і—П—В
—Б –Є–љ—В–µ—А–≤–∞–ї–Њ–Љ –≤ 1 –Љ–Є–љ, –њ—А–Є —Б—А–∞–≤–љ–Є—В–µ–ї—М–љ–Њ –±–Њ–ї—М—И–Є—Е вАФ —З–µ—А–µ–Ј 2 –Љ–Є–љ,
–њ—А–Є —Н—В–Њ–Љ –і–Њ–ї–ґ–љ–Њ –±—Л—В—М –≤—Л–њ–Њ–ї–љ–µ–љ–Њ –љ–µ –Љ–µ–љ–µ–µ —В—А–µ—Е –Є–Ј–Љ–µ—А–µ–љ–Є–є. –Я–Њ—Н—В–Њ–Љ—Г
–њ—А–Є –Њ–≥—А–∞–љ–Є—З–µ–љ–љ–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є –†–Ы–° –≤–Ї–ї—О—З–∞—О—В –Ј–∞–±–ї–∞–≥–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Є —Б–Є—Б—В–µ–Љ–∞—В–Є—З–µ—Б–Ї–Є –≤–µ–і—Г—В –љ–∞–±–ї—О–і–µ–љ–Є—П –Ј–∞ –њ–Њ—П–≤–ї–µ–љ–Є–µ–Љ –љ–∞ –Ш–Ъ–Ю —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–Њ–≤.
–Т –Љ–Њ–Љ–µ–љ—В –њ–Њ—П–≤–ї–µ–љ–Є—П —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –Њ–њ—А–µ–і–µ–ї—П—О—В –њ–µ–ї–µ–љ–≥ (–Ї—Г—А—Б–Њ–≤–Њ–є
—Г–≥–Њ–ї) –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –љ–µ–≥–Њ, –Ј–∞–Љ–µ—З–∞—О—В –≤—А–µ–Љ—П –њ–Њ —Б—Г–і–Њ–≤—Л–Љ —З–∞—Б–∞–Љ –Є –Њ—В—Б—З–µ—В –ї–∞–≥–∞, –њ—Г—Б–Ї–∞—О—В —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А. –І–µ—А–µ–Ј 1 –Є–ї–Є 2 –Љ–Є–љ –њ–Њ —Б–µ–Ї—Г–љ–і–Њ–Љ–µ—А—Г
–≤—В–Њ—А–Є—З–љ–Њ –Њ–њ—А–µ–і–µ–ї—П—О—В –њ–µ–ї–µ–љ–≥ –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Н—В–Њ–≥–Њ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞, –Ј–∞–Љ–µ—З–∞—О—В –Њ—В—Б—З–µ—В –ї–∞–≥–∞.. –Ч–∞—В–µ–Љ —З–µ—А–µ–Ј —В–∞–Ї–Њ–є –ґ–µ –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –≤ —В—А–µ—В–Є–є —А–∞–Ј –Њ–њ—А–µ–і–µ–ї—П—О—В –њ–µ–ї–µ–љ–≥, —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —В–Њ–≥–Њ –ґ–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –Є –Ј–∞–Љ–µ—З–∞—О—В –Њ—В—Б—З–µ—В –ї–∞–≥–∞.
–Я–Њ—Б–ї–µ —Н—В–Њ–≥–Њ –њ—А–Є—Б—В—Г–њ–∞—О—В –Ї –≥—А–∞—Д–Є—З–µ—Б–Ї–Њ–Љ—Г –њ–Њ—Б—В—А–Њ–µ–љ–Є—О, –Ї–Њ—В–Њ—А–Њ–µ
–Љ–Њ–ґ–µ—В –±—Л—В—М –≤—Л–њ–Њ–ї–љ–µ–љ–Њ —Б–њ–Њ—Б–Њ–±–∞–Љ–Є –Є—Б—В–Є–љ–љ–Њ–є –Є–ї–Є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Њ–Ї.
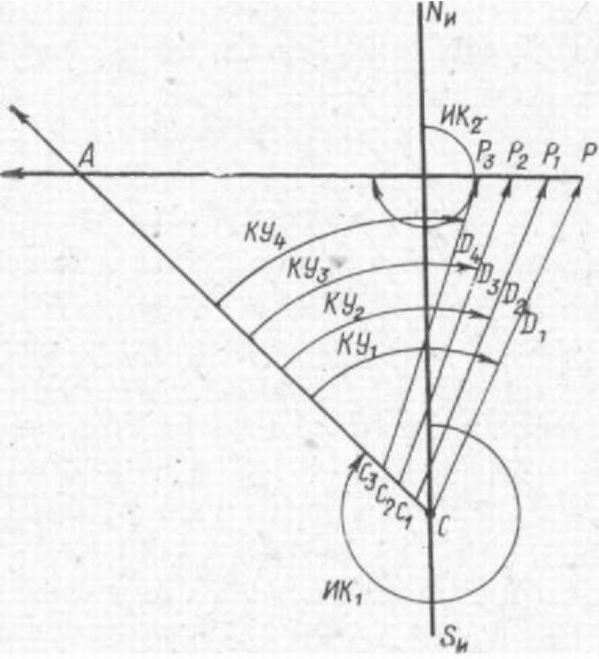
–°–њ–Њ—Б–Њ–± –Є—Б—В–Є–љ–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Ї–Є —Г–і–Њ–±–µ–љ —В–µ–Љ, —З—В–Њ –Њ–љ
–њ–Њ–Ј–≤–Њ–ї—П–µ—В –≤–Њ—Б–њ—А–Њ–Є–Ј–≤–µ—Б—В–Є –љ–∞–≥–ї—П–і–љ–Њ –љ–∞ –ї–Є—Б—В–µ –±—Г–Љ–∞–≥–Є –Є–ї–Є –љ–∞ –Ї–∞—А—В–µ
–і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ –Њ–±–Њ–Є—Е —Б—Г–і–Њ–≤. –Э–∞ –ї–Є—Б—В–µ –±—Г–Љ–∞–≥–Є (—А–Є—Б.106)
–њ—А–Њ–≤–Њ–і—П—В –њ—А—П–Љ—Г—О, –Є–Ј–Њ–±—А–∞–ґ–∞—О—Й—Г—О –ї–Є–љ–Є—О –Є—Б—В–Є–љ–љ–Њ–≥–Њ N–ШS–Ш, –Є –Є–Ј –њ—А–Њ–Є–Ј–≤–Њ–ї—М–љ–Њ–є —В–Њ—З–Ї–Є –° –љ–∞ –љ–µ–є —Б—В—А–Њ—П—В —Г–≥–Њ–ї, —А–∞–≤–љ—Л–є –Ш–Ъ1 (–Я–£) —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞
–Є –њ—А–Њ–≤–Њ–і—П—В –ї–Є–љ–Є—О, –Ї–Њ—В–Њ—А–∞—П –±—Г–і–µ—В –Є–Ј–Њ–±—А–∞–ґ–∞—В—М –ї–Є–љ–Є—О –Є—Б—В–Є–љ–љ–Њ–≥–Њ –Ї—Г—А—Б–∞
(–њ—Г—В–Є). –Э–∞ —Н—В–Њ–є –ї–Є–љ–Є–Є –Њ—В —В–Њ—З–Ї–Є –° –љ–∞–љ–Њ—Б—П—В —В–Њ—З–Ї–Є –°1, –°2, –°3 –Є —В. –і.,
—Б —А–∞—Б—Б—В–Њ—П–љ–Є–µ–Љ –Љ–µ–ґ–і—Г –љ–Є–Љ–Є, –≤ –њ—А–Є–љ—П—В–Њ–Љ –Љ–∞—Б—И—В–∞–±–µ, —А–∞–≤–љ—Л–Љ —А–∞—Б—Б—В–Њ—П–љ–Є—О, –њ—А–Њ—Е–Њ–і–Є–Љ–Њ–Љ—Г —Б–≤–Њ–Є–Љ —Б—Г–і–љ–Њ–Љ –Ј–∞ –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –Љ–µ–ґ–і—Г (–љ–∞–±–ї—О–і–µ–љ–Є—П–Љ–Є (–Ј–∞ 1 –Є–ї–Є 2 –Љ–Є–љ). –Т —В–Њ—З–Ї–∞—Е –°, –°1 –°2 –Є –°3 —Б—В—А–Њ—П—В —Г–≥–ї—Л
—Б –ї–Є–љ–Є–µ–є –Ш–Ъ (–Я–£), —А–∞–≤–љ—Л–µ –Ї—Г—А—Б–Њ–≤—Л–Љ –≤ –Љ–Њ–Љ–µ–љ—В –љ–∞–±–ї—О–і–µ–љ–Є—П, –Є –њ—А–Њ–≤–Њ–і—П—В –ї–Є–љ–Є–Є (–ї–Є–љ–Є–Є –њ–µ–ї–µ–љ–≥–Њ–≤), –њ–Њ –Ї–Њ—В–Њ—А—Л–Љ –Њ—В–Ї–ї–∞–і—Л–≤–∞—О—В –≤ —В–Њ–Љ –ґ–µ –Љ–∞—Б—И—В–∞–±–µ –Є–Ј–Љ–µ—А–µ–љ–љ—Л–µ —А–∞—Б—Б—В–Њ—П–љ–Є—П –Є –њ–Њ–ї—Г—З–∞—О—В —В–Њ—З–Ї–Є –†, –†1 –†2, –†3. –Я—А—П–Љ–∞—П,
–њ—А–Њ—Е–Њ–і—П—Й–∞—П —З–µ—А–µ–Ј –і–∞–љ–љ—Л–µ —В–Њ—З–Ї–Є, –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В –ї–Є–љ–Є—О –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П
–љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, —В. –µ. –ї–Є–љ–Є—О –µ–≥–Њ –Ш –Ъ (–Є–ї–Є –ї–Є–љ–Є—О –Я–£), –∞ —Г–≥–Њ–ї,
—Б–Њ—Б—В–∞–≤–ї—П–µ–Љ—Л–є –µ—О —Б –ї–Є–љ–Є–µ–є N–ШS–Ш –і–∞—Б—В –Ш–Ъ2 (–Я–£) —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞. –Ф–ї–Є–љ–∞
–Њ—В—А–µ–Ј–Ї–Њ–≤ –†–†1, –†1–†2 –Є –†2–†3 –≤ –њ—А–Є–љ—П—В–Њ–Љ –Љ–∞—Б—И—В–∞–±–µ –і–∞–µ—В —А–∞—Б—Б—В–Њ—П–љ–Є—П
–≤ –Љ–Є–ї—П—Е, –њ—А–Њ—Е–Њ–і–Є–Љ—Л–µ —Н—В–Є–Љ —Б—Г–і–љ–Њ–Љ –Ј–∞ –љ–∞–±–ї—О–і–∞–µ–Љ—Л–µ –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Є –≤—А–µ–Љ–µ–љ–Є (1 –Є–ї–Є 2 –Љ–Є–љ). –Х—Б–ї–Є –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Є –≤—А–µ–Љ–µ–љ–Є –±—Л–ї–Є –њ—А–Є–љ—П—В—Л –≤ 1 –Љ–Є–љ
(–≤—Б–µ–≥–Њ 3 –Љ–Є–љ, –Є–ї–Є 1/20 —З), —В–Њ –і–ї—П
–Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –њ–Њ–ї—Г—З–µ–љ–љ–Њ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –†–† 3 –≤ –Љ–Є–ї—П—Е —Г–Љ–љ–Њ–ґ–∞—О—В –љ–∞
20, –∞ –µ—Б–ї–Є –њ—А–Њ–Љ–µ–ґ—Г—В–Ї–Є –≤—А–µ–Љ–µ–љ–Є
–±—Л–ї–Є –њ—А–Є–љ—П—В—Л –≤ 2 –Љ–Є–љ (–≤—Б–µ–≥–Њ
6 –Љ–Є–љ –Є–ї–Є 1/10 —З), —В–Њ —Г–Љ–љ–Њ–ґ–∞—О—В
–љ–∞ 10 –Є –њ–Њ–ї—Г—З–∞—О—В —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.
–†–Є—Б. 106
–Я—А–Є —В–∞–Ї–Њ–Љ –њ–Њ—Б—В—А–Њ–µ–љ–Є–Є –Љ–Њ–ґ–љ–Њ –њ–Њ–ї—Г—З–Є—В—М —В–Њ—З–Ї—Г –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П
–ї–Є–љ–Є–Є –Ї—Г—А—Б–Њ–≤ –Њ–±–Њ–Є—Е —Б—Г–і–Њ–≤ (—В–Њ—З–Ї—Г –Р) –Є –Њ–њ—А–µ–і–µ–ї–Є—В—М –≤—А–µ–Љ—П, –Ї–Њ–≥–і–∞ —Б—Г–і–∞ –Љ–Њ–≥—Г—В –Њ–Ї–∞–Ј–∞—В—М—Б—П –≤ —Н—В–Њ–є
—В–Њ—З–Ї–µ, –µ—Б–ї–Є –Њ–љ–Є –љ–µ –±—Г–і—Г—В –Љ–µ–љ—П—В—М
—Б–≤–Њ–Є –Ї—Г—А—Б—Л –Є —Б–Ї–Њ—А–Њ—Б—В–Є.
–°–њ–Њ—Б–Њ–± –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Ї–Є –њ—А–Њ—Й–µ
–Є –≤—Л–њ–Њ–ї–љ—П–µ—В—Б—П –±—Л—Б—В—А–µ–µ, —З–µ–Љ
–Њ–њ–Є—Б–∞–љ–љ—Л–є –≤—Л—И–µ, –љ–Њ –ї–Є—И–µ–љ
–љ–∞–≥–ї—П–і–љ–Њ—Б—В–Є, —В–∞–Ї –Ї–∞–Ї –Њ—В—А–∞–ґ–∞–µ—В —В–Њ–ї—М–Ї–Њ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–∞ —Н–Ї—А–∞–љ–µ –†–Ы–°. –Ю—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Г—О –њ—А–Њ–Ї–ї–∞–і–Ї—Г –≤—Л–њ–Њ–ї–љ—П—О—В
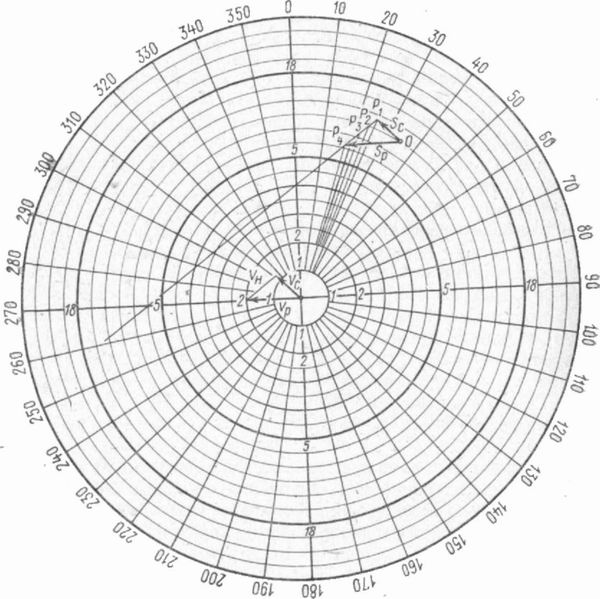
–љ–∞ —Б–њ–µ—Ж–Є–∞–ї—М–љ–Њ–Љ –Љ–∞–љ–µ–≤—А–µ–љ–љ–Њ–Љ –њ–ї–∞–љ—И–µ—В–µ. –°–≤–Њ–µ —Б—Г–і–љ–Њ –њ—А–Є–љ–Є–Љ–∞—О—В –≤ —Ж–µ–љ—В—А–µ
–њ–ї–∞–љ—И–µ—В–∞, –Ї–∞–Ї –≤ –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ–Њ—Б—В–Є –љ–∞ —Н–Ї—А–∞–љ–µ –†–Ы–° вАФ –≤ –µ–≥–Њ —Ж–µ–љ—В—А–µ. –Э–∞
–ї–Є–љ–Є—П—Е –љ–∞–±–ї—О–і–∞–µ–Љ—Л—Е –њ–µ–ї–µ–љ–≥–Њ–≤ –Њ—В —Ж–µ–љ—В—А–∞ –њ–ї–∞–љ—И–µ—В–∞ (—А–Є—Б. 107)
–Њ—В–Ї–ї–∞–і—Л–≤–∞—О—В –Є–Ј–Љ–µ—А–µ–љ–љ—Л–µ —А–∞—Б—Б—В–Њ—П–љ–Є—П D1 D2 D3 –Є D4; –њ–Њ–ї—Г—З–µ–љ–љ—Л–µ
—В–Њ—З–Ї–Є –†1 –†2, –†3 –Є –†4 —Б–Њ–µ–і–Є–љ—П—О—В –њ—А—П–Љ–Њ–є –Є –њ–Њ–ї—Г—З–∞—О—В –ї–Є–љ–Є—О –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, –∞ –Њ—В—А–µ–Ј–Њ–Ї —Н—В–Њ–є –ї–Є–љ–Є–Є P1P4 –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞.
–Ф–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ш–Ъ2 –Є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ —Б—В—А–Њ—П—В
—В—А–µ—Г–≥–Њ–ї—М–љ–Є–Ї —Б–Ї–Њ—А–Њ—Б—В–µ–є —Г —Ж–µ–љ—В—А–∞ –њ–ї–∞–љ—И–µ—В–∞. –Я–Њ –ї–Є–љ–Є–Є –Ї—Г—А—Б–∞ —Б–≤–Њ–µ–≥–Њ
—Б—Г–і–љ–∞ –Њ—В–Ї–ї–∞–і—Л–≤–∞—О—В –≤–µ–Ї—В–Њ—А –µ–≥–Њ —Б–Ї–Њ—А–Њ—Б—В–Є vc –Ј–∞ –≤—А–µ–Љ—П –љ–∞–±–ї—О–і–µ–љ–Є–є,
–∞ –Є–Ј –Ї–Њ–љ—Ж–∞ —Н—В–Њ–≥–Њ –≤–µ–Ї—В–Њ—А–∞ –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ –ї–Є–љ–Є–Є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –Ї—Г—А—Б–∞
–љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ вАФ –≤–µ–Ї—В–Њ—А –µ–≥–Њ —Б–Ї–Њ—А–Њ—Б—В–Є v–љ, –њ–Њ –≤–µ–ї–Є—З–Є–љ–µ, —А–∞–≤–љ–Њ–є
–†1–†4, –Є, —Б–Њ–µ–і–Є–љ–Є–≤ –Ї–Њ–љ–µ—Ж —Н—В–Њ–≥–Њ –≤–µ–Ї—В–Њ—А–∞ —Б —Ж–µ–љ—В—А–Њ–Љ –њ–ї–∞–љ—И–µ—В–∞, –њ–Њ–ї—Г—З–∞—О—В
–≤–µ–Ї—В–Њ—А v—А –Є—Б—В–Є–љ–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞; –≤–µ–ї–Є—З–Є–љ–∞ —Н—В–Њ–≥–Њ
–≤–µ–Ї—В–Њ—А–∞ –≤ –њ—А–Є–љ—П—В–Њ–Љ –Љ–∞—Б—И—В–∞–±–µ –і–∞–µ—В —Б–Ї–Њ—А–Њ—Б—В—М, –∞ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ вАФ –Є—Б—В–Є–љ–љ—Л–є –Ї—Г—А—Б –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞. –Ф–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —Н–ї–µ–Љ–µ–љ—В–Њ–≤ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –њ–Њ –†–Ы–° –Љ–Њ–ґ–љ–Њ –≤–Њ—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П –њ–Њ—Б—В—А–Њ–µ–љ–Є–µ–Љ
—В—А–µ—Г–≥–Њ–ї—М–љ–Є–Ї–∞ –њ—Г—В–µ–є –љ–∞ –ї–Є–љ–Є–Є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ
—Б—Г–і–љ–∞.
–Ф–ї—П —Н—В–Њ–≥–Њ –Њ—В —В–Њ—З–Ї–Є –†1 –≤ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–Є, –Њ–±—А–∞—В–љ–Њ–Љ –Ї—Г—А—Б—Г —Б–≤–Њ–µ–≥–Њ
—Б—Г–і–љ–∞, –Њ—В–Ї–ї–∞–і—Л–≤–∞—О—В —А–∞—Б—Б—В–Њ—П–љ–Є–µ, –њ—А–Њ–є–і–µ–љ–љ–Њ–µ –Є–Љ –Ј–∞ –≤—А–µ–Љ—П –љ–∞–±–ї—О–і–µ–љ–Є–є (3 –Є–ї–Є 6 –Љ–Є–љ), –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –ґ–µ –≤–µ–Ї—В–Њ—А–∞ –њ—Г—В–Є S–° –і–Њ–ї–ґ–љ–Њ –±—Л—В—М –≤
—Б—В–Њ—А–Њ–љ—Г –і–≤–Є–ґ–µ–љ–Є—П —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞ –Є–Ј —В–Њ—З–Ї–Є –Ю. –Ч–∞—В–µ–Љ —В–Њ—З–Ї–Є –Ю –Є –†4 —Б–Њ–µ–і–Є–љ—П—О—В –њ—А—П–Љ–Њ–є, –Ї–Њ—В–Њ—А–∞—П –±—Г–і–µ—В –Є–Ј–Њ–±—А–∞–ґ–∞—В—М –≤–µ–Ї—В–Њ—А S–† –Є—Б—В–Є–љ–љ–Њ–≥–Њ –њ—Г—В–Є
(—А–∞—Б—Б—В–Њ—П–љ–Є–µ), –њ—А–Њ—Е–Њ–і–Є–Љ–Њ–≥–Њ –љ–∞–±–ї—О–і–∞–µ–Љ—Л–Љ —Б—Г–і–љ–Њ–Љ –Ј–∞ —В–Њ—В –ґ–µ –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є, –∞ –µ–≥–Њ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ, –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ —Ж–µ–љ—В—А–∞ –њ–ї–∞–љ—И–µ—В–∞, –Є—Б—В–Є–љ–љ—Л–є –Ї—Г—А—Б.
–†–Є—Б. 107
–Ъ—А–∞—В—З–∞–є—И–µ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–µ —Б–±–ї–Є–Ј—П—В—Б—П –Њ–±–∞ —Б—Г–і–љ–∞, –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –≤–µ–ї–Є—З–Є–љ–Њ–є –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А–∞ –≤ –Љ–∞—Б—И—В–∞–±–µ –њ–ї–∞–љ—И–µ—В–∞, –Њ–њ—Г—Й–µ–љ–љ–Њ–≥–Њ –Є–Ј —Ж–µ–љ—В—А–∞ –њ–ї–∞–љ—И–µ—В–∞ –љ–∞ –ї–Є–љ–Є—О –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –Ї—Г—А—Б–∞ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.
–Я–Њ—Б—В—А–Њ–µ–љ–Є—П –љ–∞ —А–Є—Б. 106 –Є —А–Є—Б. 107 –≤—Л–њ–Њ–ї–љ–µ–љ—Л –њ—А–Є –Ш–Ъ = 315¬∞
–Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞, —Б –Ї–Њ—В–Њ—А–Њ–≥–Њ –≤–µ–і—Г—В –љ–∞–±–ї—О–і–µ–љ–Є—П, 12 —Г–Ј–ї–Њ–≤ –њ–Њ —Б–ї–µ–і—Г—О—Й–Є–Љ –і–∞–љ–љ—Л–Љ:
–≠–ї–µ–Љ–µ–љ—В—Л –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Њ–њ—А–µ–і–µ–ї–Є–ї–Є—Б—М: –Ш–Ъ =
270¬∞, v = 20 —Г–Ј–ї–∞–Љ, –Ї—А–∞—В—З–∞–є—И–µ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ —Б–±–ї–Є–ґ–µ–љ–Є—П 3,3 –Љ–Є–ї–Є.
–Т–њ–µ—А–µ–і
–Ю–≥–ї–∞–≤–ї–µ–љ–Є–µ
–Э–∞–Ј–∞–і
|

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ