Воздушная подушка — это слой сжатого воздуха, создаваемый под корпусом корабля или его несущими поверхностями с помощью специальных вентиляторов или скоростным напором набегающего воздушного потока и поддерживающий корпус корабля над поверхностью воды или земли.
Корабли, у которых воздушная подушка во всех режимах движения создается вентиляторами, называются кораблями на статической воздушной подушке (собственно корабли на воздушной подушке). Корабли, у которых воздушная подушка в основном режиме движения у поверхности воды или земли создается скоростным напором набегающего потока, называются кораблями на динамической воздушной подушке (экранопланы).
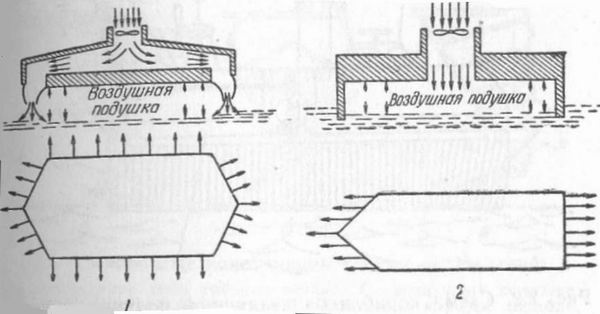
Все корабли, суда и аппараты на статической воздушной подушке (КВП) подразделяются на КВП с полным отрывом от воды в основном режиме движения (КВП амфибийного типа), которые могут двигаться как над водой, так и над ровной поверхностью (земля, лед), и на КВП с неполным отрывом от воды (КВП скегового типа), которые могут двигаться только по воде (рис. 2.1).
Существуют две системы образования воздушной подушки: периферийная система раздачи воздуха с промежуточным между вентилятором и воздушной подушкой элементом, называемым ресивером (сопловая схема, характерная для КВП с полным отрывом от воды), и система подачи воздуха непосредственно от вентиляторов в область повышенного давления (камерная схема, характерная для КВП с неполным отрывом от воды).
Вследствие отсутствия у кораблей на воздушной подушке контакта корпуса с водой или минимальный его контакт резко уменьшаются сопротивление трения и волновое сопротивление, а подъем корпуса КВП над водой и демпфирующее влияние воздушной подушки ослабляют удары корпуса о волну.
Рис. 2.1. Схема кораблей на воздушной подушке: 1 - с полным отрывом от воды; 2 — с неполным отрывом от воды
Благодаря этому представляется возможным создавать КВП со скоростью хода, достигающей 100 уз.
Принципиальная схема КВП с полным отрывом от воды в основном режиме движения (рис. 2.2) представляет собой платформу 9, на которой устанавливаются надстройка 2, оружие, главные двигатели 8 и движители 4 (как правило, воздушные винты или воздушно-реактивные движители). Управление кораблем осуществляется из ходовой рубки 1 с помощью вертикальных 7 и горизонтальных 6 воздушных рулей. Для создания устойчивости на курсе служит стабилизатор 5. Воздушная подушка образуется нагнетанием воздуха мощными высокопроизводительными осевыми вентиляторами 3, подающими воздух в ресивер (воздухопровод) 11, откуда он через сопловое устройство, расположенное по всему периметру платформы направляется под его днище и в гибкое ограждение 10.
Давление в воздушной подушке у КВП этого типа находится в пределах 150-300 кгс/м³. В ресивере оно обычно больше в 1,2—1,6 раза. Для уменьшения расхода воздуха, повышения мореходности и проходимости большинство КВП имеет гибкое ограждение, в описаниях и литературе часто называемое эластичной юбкой.
Рис. 2.3. Типовые конструкции гибких ограждений:
а — ограждение типа гибкого сопла: 1 — воздушная подушка; 2 — непроницаемая диафрагма; 3 — основание корпуса корабля; б — гибкий ресивер с гибким соплом: 1 — воздушная подушка; 2 — основание корпуса корабля; 3 — отверстие; 4 — вертикальная диафрагма; 5 — сопло; в — ограждение с тросовыми оттяжками: 1 — воздушная подушка; 2 — основание корпуса корабля; 3 — радиальные оттяжки
Корабль на воздушной подушке с неполным отрывом от воды (КВП скегового типа), схема которого приведена на рис. 2.4, представляет собой платформу 6 с установленными на ней надстройкой 5, ходовой рубкой 1 и оружием. Внутри надстройки размещен двигатель 3 для вентилятора 2, который подает воздух под днище корабля, создавая воздушную подушку, ограждаемую с бортов частично погруженными жесткими (иногда гибкими) стенками 10 или узкими корпусами (скегами), а в носовой л кормовой оконечностях — гибким ограждением 9 или жесткими механическими заслонками различных конструкций, воздух в которые поступает через воздухопровод 4 от этого же вентилятора. Движителями корабля могут быть быстроходные водометы 7 или гребные винты со своими Двигателями 8, расположенными, как правило, в бортовых стенках. Если КВП имеет движителем гребной винт, то в качестве управления курсом используется балансирный или полубалансирный руль. КВП с водометным движителем управляется по курсу изменением направления водяной струи, выбрасываемой из движителя. При движении КВП часть бортовых стенок погружена в воду (на рис. 2.4 погруженная часть стенок заштрихована). Корабли на воздушной подушке с неполным отрывом от воды могут иметь максимальную скорость 40—50 уз.
Рис. 2.3. Типовые конструкции гибких ограждений:
а — ограждение типа гибкого сопла: 1 — воздушная подушка; 2 — непроницаемая диафрагма; 3 — основание корпуса корабля; б — гибкий ресивер с гибким соплом: 1 — воздушная подушка; 2 — основание корпуса корабля; 3 — отверстие; 4 — вертикальная диафрагма; 5 — сопло; в — ограждение с тросовыми оттяжками: 1 — воздушная подушка; 2 — основание корпуса корабля; 3 — радиальные оттяжки
При дальнейшем увеличении скорости резко возрастает гидродинамическое сопротивление движению погруженной части бортовых стенок. Энерговооруженность КВП составляет 35—40 л. с. на тонну массы корабля. Водоизмещение КВП этого типа может быть значительно большим, чем КВП с полным отрывом от воды.
Остойчивость. На КПВ с полным отрывом от воды поперечная и продольная остойчивость осуществляется разбивкой воздушной подушки на отдельные секции, разделенные воздушными завесами, или надувными килями, которые, препятствуя свободному перетеканию воздуха в смежные секции, вызывают разность давлений в них при крене КВП, в результате чего возникает восстанавливающий момент. Остойчивость КВП над твердой поверхностью в режиме висения (V=0) всегда выше, чем над водой так как высота подъема КВП над впадиной воды, образующейся под воздействием воздушной подушки на поверхность воды, превышает при прочих равных условиях высоту подъема КВП над твердой поверхностью, а чем выше подъем КВП над опорной поверхностью, тем ниже его остойчивость. При движении КВП этого типа его начальная остойчивость повышается с увеличением скорости от значения, соответствующего режиму висения над водой, до значения, соответствующего режиму висения над твердой поверхностью.
Начальные поперечная и продольная метацентрические высоты определяются по формулам:
ψ, θ— угол крена (дифферента),G — вес КВП, тс. Для сравнения начальной остойчивости КВП различных типов величины
выражают в безразмерной форме:
где Вп и Ln — ширина и длина воздушной подушки соответственно, м.
Минимальные значения безразмерных начальных метацентрических высот составляют:
Опыт эксплуатации КВП с полным отрывом от воды показал, что при касании гибким ограждением воды при его движении может возникнуть явление «зарывания». Оно заключается в том, что стабильное положение КВП при неизменных условиях движения за сравнительно короткое время (несколько секунд) существенно изменяется дифферент приобретает отрицательное значение, высота подъема уменьшается, в ряде случаев происходит самопроизвольный разворот и значительный крен. Это связано с затягиванием части гибкого ограждения внутрь воздушной подушки, вследствие ее контакта с набегающим потоком воды и возникновением на контактирующей части тормозящей силы. «Зарывание» КВП может привести к его опрокидыванию.
На КВП с неполным отрывом от воды восстанавливающий момент при наклонении корабля создается вследствие действия гидростатических или гидродинамических сил на часть бортовых стенок, погруженных в воду. Так как на КВП этого типа воздух подается в общую подкупольную камеру, перераспределения давления при наклонении корабля практически не происходит, поэтому восстанавливающий момент воздушной подушки составляет малую часть общего восстанавливающего момента. При движении КВП этого типа со скоростью Fr < 1 начальная остойчивость, как правило, снижается на 15—20% от значения, соответствующего режиму висения над водой. При скорости Fr < 1,0-1,1 начальная остойчивость возвращается к исходному значению, а при скорости Fr =1,5ч-1,7 достигает максимума.
Управляемость. Управляемостью называется способность КВП изменять свое положение в пространстве и свой вектор скорости в результате вращения вокруг центра тяжести. Движение КВП без использования воздушной подушки практически не отличается от движения обычного водоизмещающего корабля и подчиняется тем же законам.
Для управления КВП применяются устройства, подразделяющиеся на основные и вспомогательные. К основным органам управления относится рулевое устройство, обеспечивающее удержание или изменение курса. Вспомогательные органы управления создают силы и моменты в горизонтальной плоскости для управления дрейфом и рысканием (и курсом — в дополнение к рулевому устройству), а также устройства для управления высотой висения, креном и дифферентом. Из всего многообразия рулевых устройств выделяются два основных комплекса управления;
- изолированный руль в сочетании с изолированным стабилизатором;
— стабилизатор в сочетании с рулем за стабилизатором (с закрылками или без них). Устойчивость КВП при движении на прямом курсе обеспечивается выбором его аэродинамической компоновки, взаимным расположением центра тяжести корабля и движителей, а также развитыми воздушными стабилизаторами. В настоящее время для управления курсом чаще всего применяются воздушные рули, воздушные винты на поворотных пилонах, струйные рули, устройства для подъема гибкого ограждения и др.
При увеличении скорости в диапазоне 0 < Fг < 0,563 (10—20 уз) волновое сопротивление принимает ряд максимальных значений (горбов), на преодоление которых требуется значительное повышение мощности двигателей, после чего величина волнового сопротивления монотонно убывает. На практике встречается не более одного-двух горбов волнового сопротивления. При значительном увеличении скорости на корпусе КВП возникает аэродинамическая подъемная сила, уменьшающая нагрузку на воду, давление в воздушной подушке и ресивере. В некоторых случаях влияние разгрузки на КВП на ходу приводит к тому, что величина расхода воздуха при движении КВП может измениться на 20—30%.
Явление «зарывания» может возникнуть и на тихой воде на скорости более 55 уз. Поэтому при управлении КВП на больших скоростях необходимо избегать контакта носовой части ограждения с водой (не допускать дифферента на нос). При увеличении шага винта (для увеличения скорости) увеличивается упор, который создает дифферент на нос. Чтобы избежать «зарывания», необходима перекладка горизонтального руля. Следствием увеличения шага винта является снижение числа оборотов двигателя и связанного с ним вентилятора, в результате чего уменьшается высота подъема КВП и приближение кромки гибкого ограждения к воде. Вертикальный руль при работе создает не только момент рыскания, но и кренящий момент, вызывающий статический крен и раскачку. Так как при повороте может возникнуть дифферент, для его устранения используется горизонтальный руль. При возникновении нежелательных наклонений КВП используется устройство для подъема гибкого ограждения, В случае возникновения опасного дифферента на нос рекомендуется немедленно изменить шаг воздушных винтов до нулевого положения и увеличить число оборотов вентиляторных двигателей, что вызовет увеличение жесткости надувных частей гибкого ограждения и улучшит динамическую устойчивость КВП вследствие возрастания гироскопического момента рабочих колес вентиляторов. Вероятность «зарывания» и опрокидывания КВП зависит от управления его движением. Чтобы избежать этого, необходимо точно выполнять инструкцию по эксплуатации КВП, в которую включаются указания о допустимой скорости хода, углах дрейфа, дифферента и другие данные.
Радиус циркуляции КВП с полным отрывом от воды и выбег при торможении в метрах можно определить по формулам:
где V — скорость КВП, при которой производится поворот, уз; G — общий вес КВП, тс;
N — мощность двигателей воздушных винтов, л. с.
Радиус циркуляции колеблется у существующих КВП в пределах 40—70 длин корпуса. КВП в режиме висения (без поступательного движения) совершает разворот в пределах длины. При движении на малых скоростях и в процессе остановки КВП неустойчив на курсе.
Специфической особенностью движения КВП над водой является брызгообразование. Оно зависит главным образом от величины динамического давления воздуха, растекающегося радиально в стороны по поверхности воды, и возникает, если величина этого давления становится больше 7—12 кгс/см². Особенно велико брызгообразование в режиме парения. Оно сильно затрудняет наблюдение за окружающей обстановкой. Для уменьшения брызгообразования устанавливаются специальные брызгоотражатели в виде горизонтальных пластин. С увеличением скорости более 30 уз основная масса брызг отбрасывается по бортам и остается за кормой. При плавании в условиях низких температур (начиная с 0°) возможно незначительное обледенение КВП.
При плавании на мелководье с критической скоростью возникает одиночная поперечная волна и сопротивление движению корабля резко возрастает, скорость движения и высота подъема КВП падают. В табл. 2.1 приведены величины критических скоростей в зависимости от глубины в районе плавания.
Таблица 2.1 Величины критических скоростей
При плавании на мелководье со скоростью больше или меньше критической резко выраженной поперечной волны не наблюдается.
КВП с неполным отрывом от воды обладают по сравнению с другими типами кораблей на воздушной подушке большей остойчивостью и лучшей управляемостью. Остойчивость КВП этого типа обеспечивается формой бортовых стенок, имеющих, как правило, малый развал шпангоутов в носовой части и существенный развал в кормовой. При наклонении корабля объем погруженной в воду части бортовой стенки со стороны крена (дифферента) увеличивается, а погруженный объем противоположной стенки уменьшается, в результате чего возникает восстанавливающий момент.
На циркуляции у КВП с неполным отрывом от воды развивается опрокидывающий момент, по величине приблизительно пропорциональный скорости поворота или углу дрейфа. Если во время циркуляции действие, например волнение, вызовет большое погружение носовой части бортовых стенок, то центр давления на них быстро переместится в нос, что приведет к резкому уменьшению радиуса циркуляции, а следовательно, и к увеличению опрокидывающего момента.
Рис. 2.5. Расчетные характеристики мореходности кораблей и судов на воздушной подушке в зависимости от высоты гибкого ограждения и веса корабля
Мореходность и амфибийность. Принято считать, что КВП с полным отрывом от воды могут преодолевать высоту волны, равную высоте их гибкого ограждения, которая колеблется от 1,2 до 2,4 м. Расчетная мореходность кораблей в зависимости от высоты гибкого ограждения и веса корабля приведена на рис. 2.5.
В зависимости от длины волны КВП с полным отрывом от воды будут иметь качку. При короткой волне (длина волны меньше длины корабля) колебания корабля остаются малыми во всем диапазоне скоростей. При длинной волне (длина волны более б длин корабля) корабль стремится следовать за профилем волны, особенно на малых скоростях движения. Однако с увеличением скорости движения максимально допустимая высота волны уменьшается. В диапазоне средних волн (1,5—6 длин корабля) колебания корабля значительны, максимально допустимая высота волны составляет примерно половину высоты подъема КВП.
Мореходность КВП с неполным отрывом от воды зависит от высоты подъема днища корпуса. Если высота волны будет меньше высоты подъема днища корабля, волны будут проходить между бортовыми стенками, не вызывая сильной килевой качки. Если высота волны такова, что она будет соприкасаться с днищем корабля, то, проходя от носа к корме и действуя, как поршень, будет вытеснять воздух из воздушной подушки. Если не будет обеспечен выход воздуха из-под кормы КВП со скоростью прохода волны пол корпусом, а в носовую часть воздушной подушки не будет подаваться воздух в количестве, равном вытесненному волной из-под корпуса, то под днищем КВП возникает большая разница давления в воздушной подушке. В результате носовая часть КВП резко опускается, ударяясь через 1—2 с о склон следующей волны. Чтобы избежать этого явления, нужно увеличить мощность вентиляторов.
Амфибийность КВП определяется возможностью его передвижения над водой и сушей, а проходимость — высотой вертикального препятствия и крутизной склона, которые может преодолеть КВП. Существующие КВП с полным отрывом от воды могут преодолевать вертикальные препятствия, высота которых на 10—20% меньше высоты гибкого ограждения, и склоны крутизной 7—10°. При проведении испытаний КВП установлено, что, если давление в воздушной подушке меньше 200 кгс/м2, КВП может идти над вязким грунтом (ил, грязь), непреодолимым для колесного и гусеничного транспорта.
Особая трудность в управлении КВП с полным отрывом от воды возникает во время преодоления полосы прибоя при подходе к берегу или отходе от него. В зависимости от уклона дна и силы приходящей зыби ширина полосы прибоя может достигать 400—1000 м, а высота прибойных волн 3—4,5 м. Особенно опасны крутые разрушающиеся волны и крупные волны, следующие одна за другой (двойные волны). При неудачном маневрировании на таких волнах возможны повреждения гибкого ограждения и жестких конструкций корпуса, а также переворачивание КВП.
Наилучшим способом приближения к берегу является движение под прямым углом к фронту волны со скоростью, равной скорости бега волн, т. е. без пересечения их гребней. Однако при скорости ветра более 10 м/с возможно забрасывание кормы, что значительно усложняет управление КВП.
Отходить от берега наиболее целесообразно под углом 45° к направлению бега волны. В этом случае как бы увеличивается длина волн и уменьшается их крутизна.
* Тактико-технические данные КВП в этой главе приводятся по материалам зарубежной печати.











 Важное
Важное

 Важное
Важное
.jpg) Важное
Важное
 Важное
Важное