–С–∞–љ–љ–µ—А

–Т–Є–і–µ–Њ–і–љ–µ–≤–љ–Є–Ї –Є–љ–љ–Њ–≤–∞—Ж–Є–є: –њ–µ—А—Б–њ–µ–Ї—В–Є–≤—Л 2025
|
¬І 40. –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –љ–∞ —Б—Г–і–љ–µ
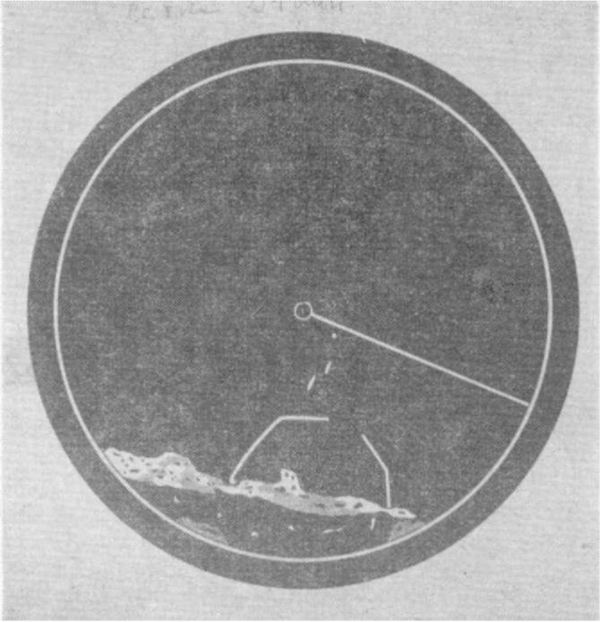
–†–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є—П вАФ —Б—А–µ–і—Б—В–≤–Њ –і–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –њ–Њ–ї–Њ–ґ–µ–љ–Є—П —А–∞–Ј–ї–Є—З–љ—Л—Е –Њ–±—К–µ–Ї—В–Њ–≤ –њ—А–Є –њ–Њ–Љ–Њ—Й–Є —А–∞–і–Є–Њ–≤–Њ–ї–љ. –°—Г–і–Њ–≤—Л–µ
—А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л–µ —Б—В–∞–љ—Ж–Є–Є (–†–Ы–°) —А–∞–±–Њ—В–∞—О—В –љ–∞ —Б–∞–љ—В–Є–Љ–µ—В—А–Њ–≤—Л—Е
–≤–Њ–ї–љ–∞—Е, –Ї–Њ—В–Њ—А—Л–µ, –њ–Њ–і–Њ–±–љ–Њ —Б–≤–µ—В–Њ–≤—Л–Љ –ї—Г—З–∞–Љ, —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ—П—О—В—Б—П
–њ—А—П–Љ–Њ–ї–Є–љ–µ–є–љ–Њ –Є –Њ–±–ї–∞–і–∞—О—В —Б–≤–Њ–є—Б—В–≤–∞–Љ–Є —А–µ—Д—А–∞–Ї—Ж–Є–Є, –і–Є—Д—А–∞–Ї—Ж–Є–Є –Є
–Є–љ—В–µ—А—Д–µ—А–µ–љ—Ж–Є–Є. –Ф–Є—Д—А–∞–Ї—Ж–Є—П –њ–Њ–Ј–≤–Њ–ї—П–µ—В —А–∞–і–Є–Њ–≤–Њ–ї–љ–∞–Љ –і–≤–Є–≥–∞—В—М—Б—П
–њ–Њ –Є–Ј–Њ–≥–љ—Г—В–Њ–Љ—Г –њ—Г—В–Є, —Б–ї–µ–і—Г—П –Ї—А–Є–≤–Є–Ј–љ–µ –Ј–µ–Љ–љ–Њ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є; —А–µ—Д—А–∞–Ї—Ж–Є—П —Г–≤–µ–ї–Є—З–Є–≤–∞–µ—В –і–∞–ї—М–љ–Њ—Б—В—М —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ –≥–Њ—А–Є–Ј–Њ–љ—В–∞ –і–Њ
2,2 hM, –≥–і–µ hMвАФ–≤—Л—Б–Њ—В–∞ –∞–љ—В–µ–љ–љ—Л —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –≤ –Љ–µ—В—А–∞—Е.
–†–∞–і–Є–Њ–≤–Њ–ї–љ—Л —Б–∞–љ—В–Є–Љ–µ—В—А–Њ–≤–Њ–≥–Њ –і–Є–∞–њ–∞–Ј–Њ–љ–∞ —Е–Њ—А–Њ—И–Њ –Њ—В—А–∞–ґ–∞—О—В—Б—П
–Њ—В –њ—А–µ–њ—П—В—Б—В–≤–Є–є, –≤—Б—В—А–µ—З–∞—О—Й–Є—Е—Б—П –љ–∞ –њ—Г—В–Є –Є—Е —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ–µ–љ–Є—П. –≠—В–Њ
–њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–±–љ–∞—А—Г–ґ–Є—В—М –Њ–±—К–µ–Ї—В, –Є–Ј–Љ–µ—А–Є—В—М –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –љ–∞ –љ–µ–≥–Њ –Є
–Њ–њ—А–µ–і–µ–ї–Є—В—М —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –љ–µ–≥–Њ (—А–Є—Б. 65).
–°–Њ–≤—А–µ–Љ–µ–љ–љ—Л–є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—В—М –Њ–±—К–µ–Ї—В—Л
–≤ –Љ–Њ—А–µ –љ–∞ —А–∞—Б—Б—В–Њ—П–љ–Є–Є –±–Њ–ї–µ–µ 50 –Љ–Є–ї—М. –° –µ–≥–Њ –њ–Њ–Љ–Њ—Й—М—О –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї—П—В—М –Љ–µ—Б—В–Њ —Б—Г–і–љ–∞, —Б–љ–Њ—Б –≤–µ—В—А–Њ–Љ –Є —Н–ї–µ–Љ–µ–љ—В—Л —В–µ—З–µ–љ–Є—П, –Њ—Б—Г—Й–µ—Б—В–≤–ї—П—В—М
–њ—А–Њ–≤–Њ–і–Ї—Г –≤ —Г–Ј–Ї–Њ—Б—В—П—Е, –≤ —Г—Б–ї–Њ–≤–Є—П—Е –њ–ї–Њ—Е–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є, —Г—В–Њ—З–љ—П—В—М
–Љ–∞–љ–µ–≤—А–µ–љ–љ—Л–µ —Н–ї–µ–Љ–µ–љ—В—Л —Б—Г–і–љ–∞ –Є —Н–ї–µ–Љ–µ–љ—В—Л –і–≤–Є–ґ–µ–љ–Є—П –і—А—Г–≥–Њ–≥–Њ —Б—Г–і–љ–∞
–Є —В. –њ.
–°—Г–і–Њ–≤–∞—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–∞—П —Б—В–∞–љ—Ж–Є—П –љ–µ —Б–≤—П–Ј–∞–љ–∞ —Б –±–µ—А–µ–≥–Њ–≤—Л–Љ–Є
—Г—Б—В—А–Њ–є—Б—В–≤–∞–Љ–Є. –Р–≤—В–Њ–љ–Њ–Љ–љ–Њ—Б—В—М –њ—А–Є–±–Њ—А–∞ –і–∞–µ—В –µ–Љ—Г –±–Њ–ї—М—И–Є–µ –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–∞ –њ–µ—А–µ–і –Љ–µ—В–Њ–і–∞–Љ–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Љ–µ—Б—В–∞ —Б—Г–і–љ–∞ –њ–Њ –≤–Є–Ј—Г–∞–ї—М–љ—Л–Љ
–љ–∞–±–ї—О–і–µ–љ–Є—П–Љ –Є —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є–µ–Љ.
–Т–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –Њ–њ—А–µ–і–µ–ї—П—В—М —Б –њ–Њ–Љ–Њ—Й—М—О —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —Б—Г–і–Њ–≤–Њ–є —Б—В–∞–љ—Ж–Є–Є —А–∞—Б—Б—В–Њ—П–љ–Є—П –і–Њ –Њ—А–Є–µ–љ—В–Є—А–Њ–≤ –Є –њ–µ–ї–µ–љ–≥–Є –љ–∞ –љ–Є—Е –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –і–ї—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л—Е –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–є –Љ–µ—Б—В–∞ —Б—Г–і–љ–∞
–≤—Б–µ —В–µ —Б–њ–Њ—Б–Њ–±—Л, –Ї–Њ—В–Њ—А—Л–µ –±—Л–ї–Є –Њ–њ–Є—Б–∞–љ—Л –≤ –≥–ї. VI. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –±–ї–∞–≥–Њ–і–∞—А—П —И–Є—А–Њ–Ї–Є–Љ –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—П–Љ —Б—Г–і–Њ–≤—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л—Е —Б—В–∞–љ—Ж–Є–є, –њ–Њ—П–≤–Є–ї–Є—Б—М –Є –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л–µ —Б–њ–Њ—Б–Њ–±—Л –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–є: –≤–µ–µ—А –њ–µ–ї–µ–љ–≥–Њ–≤ –Є —А–∞—Б—Б—В–Њ—П–љ–Є–є, —Б–њ–Њ—Б–Њ–± –њ–∞—А–∞–ї–ї–µ–ї—М–љ—Л—Е —А–∞—Б—Б—В–Њ—П–љ–Є–є –Є —В. –і. –Ш–Ј
–≤—Б–µ—Е —Б–њ–Њ—Б–Њ–±–Њ–≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Љ–µ—Б—В–∞ —Б—Г–і–љ–∞ —Б –њ–Њ–Љ–Њ—Й—М—О —Б—Г–і–Њ–≤–Њ–є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —Б—В–∞–љ—Ж–Є–Є –њ—А–µ–і–њ–Њ—З—В–µ–љ–Є–µ —Б–ї–µ–і—Г–µ—В –Њ—В–і–∞–≤–∞—В—М —В–µ–Љ, –Ї–Њ—В–Њ—А—Л–µ
–Њ—Б–љ–Њ–≤–∞–љ—Л –љ–∞ –Є–Ј–Љ–µ—А–µ–љ–Є–Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л—Е —А–∞—Б—Б—В–Њ—П–љ–Є–є, —В–∞–Ї –Ї–∞–Ї
–Њ–љ–Є –Њ–±—Л—З–љ–Њ –Є–Ј–Љ–µ—А—П—О—В—Б—П –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ —В–Њ—З–љ–µ–µ, —З–µ–Љ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л–µ –њ–µ–ї–µ–љ–≥–Є.
–†–Є—Б. 65.
–Ю–і–љ–∞–Ї–Њ –Є–Љ–µ–µ—В—Б—П –љ–µ–Љ–∞–ї–Њ —Д–∞–Ї—В–Њ—А–Њ–≤, –Њ–≥—А–∞–љ–Є—З–Є–≤–∞—О—Й–Є—Е –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ –†–Ы–° –Є–ї–Є –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ —Б–љ–Є–ґ–∞—О—Й–Є—Е —В–Њ—З–љ–Њ—Б—В—М –µ–µ –њ–Њ–Ї–∞–Ј–∞–љ–Є–є.
–†–Ы–° –љ–µ –≤—Б–µ–≥–і–∞ –Љ–Њ–ґ–µ—В –Њ–±–µ—Б–њ–µ—З–Є—В—М –±–µ–Ј–Њ–њ–∞—Б–љ–Њ—Б—В—М –њ–ї–∞–≤–∞–љ–Є—П –≤ –і–∞–љ–љ–Њ–є –Њ–±—Б—В–∞–љ–Њ–≤–Ї–µ. –Ь–∞–ї–∞—П —И–Є—А–Є–љ–∞ –±–µ—А–µ–≥–Њ–≤–Њ–≥–Њ —Д–∞—А–≤–∞—В–µ—А–∞, –і–µ–є—Б—В–≤–Є–µ
—В–µ—З–µ–љ–Є—П, —Б–Є–ї—М–љ–Њ–µ –≤–Њ–ї–љ–µ–љ–Є–µ, –љ–µ–±–ї–∞–≥–Њ–њ—А–Є—П—В–љ—Л–µ –≥–Є–і—А–Њ–Љ–µ—В–µ–Њ—А–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є–µ —Г—Б–ї–Њ–≤–Є—П (–≥—А–Њ–Ј–Њ–≤—Л–µ –Њ–±–ї–∞–Ї–∞, –≤–µ—В–µ—А, –і–Њ–ґ–і—М) —З–∞—Б—В–Њ –љ–µ –њ–Њ–Ј–≤–Њ–ї—П—О—В –њ–Њ–ї–љ–Њ—Б—В—М—О –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –†–Ы–° –і–ї—П –љ–∞–≤–Є–≥–∞—Ж–Є–Є. –Я–Њ–ї—М–Ј—Г—П—Б—М —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ, —В—А—Г–і–љ–Њ –Є–Ј–Љ–µ—А—П—В—М —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Г—З–∞—Б—В–Ї–∞ –±–µ—А–µ–≥–Њ–≤–Њ–є
–ї–Є–љ–Є–Є –≤ —В–µ—Е –Љ–µ—Б—В–∞—Е, –≥–і–µ –Њ–љ–∞ –≤–і–∞–µ—В—Б—П –≤ —Б—В–Њ—А–Њ–љ—Г —Б—Г—И–Є; –љ–µ –≤—Б–µ –Њ–±—К–µ–Ї—В—Л –і–Њ—Б—В—Г–њ–љ—Л –і–ї—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ –љ–∞–±–ї—О–і–µ–љ–Є—П. –Ґ–∞–Ї, –±–µ—А–µ–≥–∞,
–њ–Њ–Ї—А—Л—В—Л–µ –ї–µ–і–љ–Є–Ї–∞–Љ–Є —Б —А–Њ–≤–љ–Њ–є –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В—М—О, –њ–Њ—З—В–Є —Б–Њ–≤–µ—А—И–µ–љ–љ–Њ –љ–µ
–Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—О—В—Б—П –љ–∞ —Н–Ї—А–∞–љ–µ. –Т–Њ–ї–љ–∞ –Њ–Ї–Њ–ї–Њ —З–µ—В—Л—А–µ—Е –±–∞–ї–ї–Њ–≤ —З–∞—Б—В–Њ
–і–µ–ї–∞–µ—В –љ–µ–≤–Њ–Ј–Љ–Њ–ґ–љ—Л–Љ —Б–≤–Њ–µ–≤—А–µ–Љ–µ–љ–љ–Њ —А–∞–Ј–ї–Є—З–Є—В—М –і–∞–ґ–µ —В–∞–Ї–Њ–є –Њ–±—К–µ–Ї—В,
–Ї–∞–Ї –≤—Б—В—А–µ—З–љ–Њ–µ —Б—Г–і–љ–Њ –Є —В. –њ. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –Њ—З–µ–љ—М –≤–µ—А–Њ—П—В–љ—Л –Њ—И–Є–±–Ї–Є –≤
–Њ–њ–Њ–Ј–љ–∞–љ–Є–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ –Њ–±—К–µ–Ї—В–∞. –°—В–∞—В–Є—Б—В–Є–Ї–∞ —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤
–≤ –Є–љ–Њ—Б—В—А–∞–љ–љ—Л—Е —Д–ї–Њ—В–∞—Е –Ј–∞ –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ –њ–Њ—Б–ї–µ–і–љ–Є—Е –ї–µ—В –њ–Њ–Ї–∞–Ј—Л–≤–∞–µ—В,
—З—В–Њ –њ–Њ—Б–ї–µ —И–Є—А–Њ–Ї–Њ–≥–Њ –≤–љ–µ–і—А–µ–љ–Є—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —В–µ—Е–љ–Є–Ї–Є –љ–∞ —В–Њ—А–≥–Њ–≤–Њ–Љ —Д–ї–Њ—В–µ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Г–≤–µ–ї–Є—З–Є–ї–Њ—Б—М. –≠—В–Њ —П–≤–ї–µ–љ–Є–µвАФ
–њ—А—П–Љ–Њ–µ —Б–ї–µ–і—Б—В–≤–Є–µ —Б–ї–µ–њ–Њ–≥–Њ –і–Њ–≤–µ—А–Є—П –Ї —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —В–µ—Е–љ–Є–Ї–µ,
–Њ—Б–љ–Њ–≤–∞–љ–љ–Њ–µ –љ–∞ –љ–µ–њ—А–∞–≤–Є–ї—М–љ–Њ–є –Ј–∞–≤—Л—И–µ–љ–љ–Њ–є –Њ—Ж–µ–љ–Ї–µ –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е
–≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є —Б—Г–і–Њ–≤—Л—Е –†–Ы–°.
–†–Є—Б. 66.
–Э–µ—Б–Љ–Њ—В—А—П –љ–∞ —Н—В–Њ —Б—Г–і–Њ–≤–∞—П –†–Ы–° –≤ —Г—Б–ї–Њ–≤–Є—П—Е –њ–ї–Њ—Е–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є
–Є–Љ–µ–µ—В –Є—Б–Ї–ї—О—З–Є—В–µ–ї—М–љ–Њ –≤–∞–ґ–љ–Њ–µ –Ј–љ–∞—З–µ–љ–Є–µ –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ, —В–∞–Ї –Ї–∞–Ї –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Ј–∞–±–ї–∞–≥–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Њ–±–љ–∞—А—Г–ґ–Є—В—М –≤—Б—В—А–µ—З–љ–Њ–µ —Б—Г–і–љ–Њ, –Њ–њ—А–µ–і–µ–ї–Є—В—М –љ–∞–ї–Є—З–Є–µ –Њ–њ–∞—Б–љ–Њ–≥–Њ —Б–±–ї–Є–ґ–µ–љ–Є—П
–Є –њ—А–Є–љ—П—В—М –Љ–µ—А—Л –і–ї—П –µ–≥–Њ —Г—Б—В—А–∞–љ–µ–љ–Є—П —Б–Њ–≥–ї–∞—Б–љ–Њ –Я–Я–°–°.
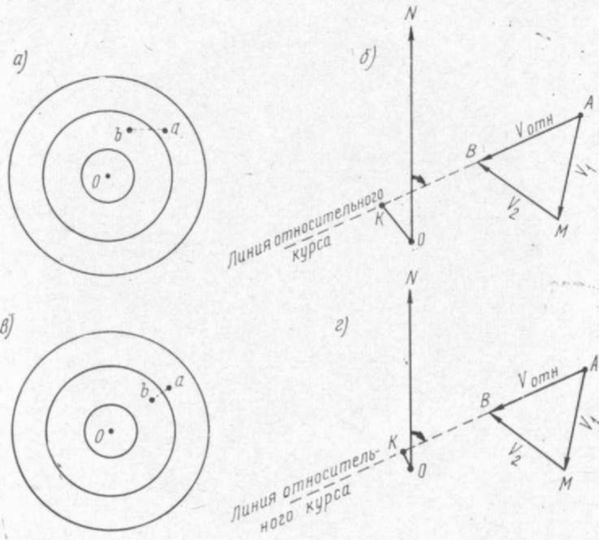
–Э–∞–Є–±–Њ–ї–µ–µ –њ—А–Њ—Б—В–Њ –Є –±—Л—Б—В—А–Њ —В–∞–Ї–∞—П –Ј–∞–і–∞—З–∞ —А–µ—И–∞–µ—В—Б—П –њ—А–Є –њ–Њ–Љ–Њ—Й–Є
—Б–њ–Њ—Б–Њ–±–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Ї–Є, –Ј–∞–Ї–ї—О—З–∞—О—Й–µ–≥–Њ—Б—П –≤ —Б–ї–µ–і—Г—О—Й–µ–Љ.
–Э–∞ –ї–Є—Б—В–µ —З–Є—Б—В–Њ–є –±—Г–Љ–∞–≥–Є –Њ—В–Љ–µ—З–∞—О—В —В–Њ—З–Ї—Г –Ю (—А–Є—Б. 66, –±, –≥) , –њ—А–Є–љ–Є–Љ–∞–µ–Љ—Г—О –Ј–∞ –Љ–µ—Б—В–Њ —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞(1).
–Э–∞ —Н–Ї—А–∞–љ–µ –†–Ы–° —Н—В–Њ–є —В–Њ—З–Ї–µ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г–µ—В —Ж–µ–љ—В—А —А–∞–Ј–≤–µ—А—В–Ї–Є. –І–µ—А–µ–Ј —В–Њ—З–Ї—Г –Ю –њ—А–Њ–≤–Њ–і—П—В –ї–Є–љ–Є—О –Є—Б—В–Є–љ–љ–Њ–≥–Њ –Љ–µ—А–Є–і–Є–∞–љ–∞ ON–Ш.
–Ю–±–љ–∞—А—Г–ґ–Є–≤ –љ–∞ —Н–Ї—А–∞–љ–µ –†–Ы–° —Н—Е–Њ-—Б–Є–≥–љ–∞–ї –і—А—Г–≥–Њ–≥–Њ —Б—Г–і–љ–∞ (—В–Њ—З–Ї–∞ –∞
–љ–∞ —А–Є—Б. 66, –∞, –≤) , –њ–µ—А–µ–љ–Њ—Б—П—В –µ–≥–Њ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –љ–∞ –±—Г–Љ–∞–≥—Г —Б –њ–Њ–Љ–Њ—Й—М—О
–Є–Ј–Љ–µ—А–µ–љ–љ—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ –њ–µ–ї–µ–љ–≥–∞ –Є —А–∞—Б—Б—В–Њ—П–љ–Є—П, –њ–Њ–ї—Г—З–∞—П
—В–Њ—З–Ї—Г –Р (—А–Є—Б. 66, –±, –≥) . –І–µ—А–µ–Ј 3вАФ6 –Љ–Є–љ (0,05вАФ0,10 —З) –≤–љ–Њ–≤—М –њ–µ—А–µ–љ–Њ—Б—П—В –њ–µ—А–µ–Љ–µ—Б—В–Є–≤—И–Є–є—Б—П –љ–∞ —Н–Ї—А–∞–љ–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї (—В–Њ—З–Ї–∞ –™ –љ–∞ —А–Є—Б.
66, –∞) –љ–∞ –±—Г–Љ–∞–≥—Г, –њ–Њ–ї—Г—З–∞—П —В–Њ—З–Ї—Г –Т (—А–Є—Б. 66, –±, –≥) .
–Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞ –≤—Б—В—А–µ—З–љ–Њ–≥–Њ —Б—Г–і–љ–∞ –њ–Њ
—Н–Ї—А–∞–љ—Г –†–Ы–° —В–Њ—З–љ–Њ –≤–Њ—Б–њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П –љ–∞ –±—Г–Љ–∞–≥–µ. –Ю—В—А–µ–Ј–Њ–Ї –Р–Т –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –≤–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –њ–µ—А–µ–Љ–µ—Й–µ–љ–Є—П —Б—Г–і–Њ–≤ (0,05вАФ
0,10 –і–ї–Є–љ—Л –≤–µ–Ї—В–Њ—А–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є V0—В–љ). –Ы–Є–љ–Є—П –Р–Т –љ–∞–Ј—Л–≤–∞–µ—В—Б—П –ї–Є–љ–Є–µ–є –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П (–Ы–Ю–Ы) . –Ю–њ–∞—Б–љ–Њ—Б—В—М —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –≤ —В–Њ–Љ —Б–ї—Г—З–∞–µ, –Ї–Њ–≥–і–∞ –Ы–Ю–Ф –њ—А–Њ—Е–Њ–і–Є—В
—З–µ—А–µ–Ј —Ж–µ–љ—В—А –Є–љ–і–Є–Ї–∞—В–Њ—А–∞ –Ї—А—Г–≥–Њ–≤–Њ–≥–Њ –Њ–±–Ј–Њ—А–∞ (–Ш–Ъ–Ю) , —В. –µ. —З–µ—А–µ–Ј —В–Њ—З–Ї—Г –Ю (–Є–ї–Є –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –±–ї–Є–Ј–Ї–Њ –Ї –љ–µ–є). –Ґ–∞–Ї–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г–µ—В –љ–Є–Ј–Љ–µ–љ–љ–Њ—Б—В–Є –њ–µ–ї–µ–љ–≥–∞ –љ–∞ –≤—Б—В—А–µ—З–љ–Њ–µ —Б—Г–і–љ–Њ (—А–Є—Б. 66,–≤,–≥). –Ґ—А–µ—Г–≥–Њ–ї—М–љ–Є–Ї –Р–Т–Ь –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–њ—А–µ–і–µ–ї–Є—В—М —Н–ї–µ–Љ–µ–љ—В—Л –і–≤–Є–ґ–µ–љ–Є—П –≤—Б—В—А–µ—З–љ–Њ–≥–Њ
—Б—Г–і–љ–∞, _–≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є –Ї–Њ—В–Њ—А–Њ–≥–Њ V2 вАФ MB (—А–Є—Б. 66, –±, –≥), –µ—Б–ї–Є
V1=AM вАФ –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞ –љ–∞–±–ї—О–і–∞—В–µ–ї—П.
(1) –Ф–ї—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Ї–Є —Б—Г—Й–µ—Б—В–≤—Г—О—В —Б–њ–µ—Ж–Є–∞–ї—М–љ—Л–µ –њ–ї–∞–љ—И–µ—В—Л, –Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ –Њ–±–ї–µ–≥—З–∞—О—Й–Є–µ –Є —Г—Б–Ї–Њ—А—П—О—Й–Є–µ –µ–µ –≤—Л–њ–Њ–ї–љ–µ–љ–Є–µ.
–Т–њ–µ—А–µ–і
–Ю–≥–ї–∞–≤–ї–µ–љ–Є–µ
–Э–∞–Ј–∞–і
|

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ


