–С–∞–љ–љ–µ—А

–£—Б–њ–µ—В—М –Њ—В—А–∞–±–Њ—В–∞—В—М –і–µ—В–∞–ї—М –Ј–∞ 10 —Б–µ–Ї—Г–љ–і
|
¬І 72. –Ш—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —А–∞–і–Є–Њ, —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є—П –Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Є –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ
–Р. –Я—А–Є–Љ–µ–љ–µ–љ–Є–µ —А–∞–і–Є–Њ –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є
–Я–Њ—П–≤–ї–µ–љ–Є–µ —А–∞–і–Є–Њ –љ–∞ —Б—Г–і–∞—Е –њ—А–Є–≤–µ–ї–Њ –Ї –љ–µ–Ї–Њ—В–Њ—А–Њ–Љ—Г –Њ–±–ї–µ–≥—З–µ–љ–Є—О
–≤ —А–∞–Ј—А–µ—И–µ–љ–Є–Є –Ј–∞–і–∞—З –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ. –Я—А–Є –њ–Њ–Љ–Њ—Й–Є —А–∞–і–Є–Њ –њ—А–µ–ґ–і–µ –≤—Б–µ–≥–Њ —Б—В–∞–ї–Њ –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–Љ –Њ–њ–Њ–≤–µ—Й–µ–љ–Є–µ –Њ –Љ–µ—Б—В–µ, —Б–Ї–Њ—А–Њ—Б—В–Є –Є –Ї—Г—А—Б–µ —Б—Г–і–Њ–≤. –Ш–Ј —Н—В–Є—Е —В—А–µ—Е –≤–µ–ї–Є—З–Є–љ –љ–∞–Є–Љ–µ–љ–µ–µ –і–Њ—Б—В–Њ–≤–µ—А–љ–Њ–є –≤–µ–ї–Є—З–Є–љ–Њ–є —П–≤–ї—П–µ—В—Б—П –Љ–µ—Б—В–Њ —Б—Г–і–љ–∞. –°–Њ–≤—А–µ–Љ–µ–љ–љ—Л–µ —Б–њ–Њ—Б–Њ–±—Л –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Љ–µ—Б—В–∞ —Б—Г–і–љ–∞ –≤ –Љ–Њ—А–µ –µ—Й–µ –љ–µ –і–∞—О—В –і–Њ—Б—В–∞—В–Њ—З–љ–Њ–є —В–Њ—З–љ–Њ—Б—В–Є, —З—В–Њ–±—Л –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М —Н—В—Г –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—О
–і–ї—П –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—П, —З—В–Њ–±—Л –Є–Ј–±–µ–ґ–∞—В—М —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П.
–†–Є—Б. 128
–†–Є—Б. 129
–Ю–і–љ–∞–Ї–Њ –і–∞–ґ–µ —Н—В–∞ –Є–љ—Д–Њ—А–Љ–∞—Ж–Є—П –њ–Њ–ї–µ–Ј–љ–∞, —В–∞–Ї –Ї–∞–Ї –Ј–∞—Б—В–∞–≤–ї—П–µ—В
–ї—О–і–µ–є —Г—Б–Є–ї–Є—В—М –±–і–Є—В–µ–ї—М–љ–Њ—Б—В—М –Є –±–Њ–ї–µ–µ —Б—В—А–Њ–≥–Њ –≤—Л–њ–Њ–ї–љ—П—В—М –Я—А–∞–≤–Є–ї–∞:
–і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ.
–Я—А–Є–Љ–µ–љ–µ–љ–Є–µ —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–∞. –†–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А
–њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–њ—А–µ–і–µ–ї–Є—В—М, –Є–і–µ—В –ї–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –≤—Б—В—А–µ—З–љ—Л–Љ
–Ї—Г—А—Б–Њ–Љ –Є–ї–Є –љ–∞—Е–Њ–і–Є—В—Б—П –≤ —Б—В–Њ—А–Њ–љ–µ. –Я–µ–ї–µ–љ–≥ –Њ—В—Б—З–Є—В—Л–≤–∞–µ—В—Б—П —Б –і–Њ—Б—В–∞—В–Њ—З–љ–Њ–є —Б—В–µ–њ–µ–љ—М—О —В–Њ—З–љ–Њ—Б—В–Є, –Њ—Б–Њ–±–µ–љ–љ–Њ –љ–∞ –±–ї–Є–Ј–Ї–Є—Е —А–∞—Б—Б—В–Њ—П–љ–Є—П—Е, –Њ–і–љ–∞–Ї–Њ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, –∞ —В–∞–Ї–ґ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ
–і–Њ –љ–µ–≥–Њ –љ–µ –Љ–Њ–≥—Г—В –±—Л—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ—Л –і–∞–ґ–µ –њ—А–Є–±–ї–Є–ґ–µ–љ–љ–Њ.
–°–Њ–≤–Љ–µ—Б—В–љ–Њ–µ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ —А–∞–і–Є–Њ –Є —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–∞. –°–Њ–≤–Љ–µ—Б—В–љ–∞—П —А–∞–±–Њ—В–∞ —А–∞–і–Є–Њ –Є —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–∞
–њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–њ—А–µ–і–µ–ї–Є—В—М –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ
—Б—Г–і–љ–∞ —В–Њ—З–љ–µ–µ, —З–µ–Љ –∞—Б—В—А–Њ–љ–Њ–Љ–Є—З–µ—Б–Ї–Є–Љ –Є –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л–Љ —Б–њ–Њ—Б–Њ–±–∞–Љ–Є, —В–∞–Ї –Ї–∞–Ї –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Њ–і–љ–Њ–≥–Њ —Б—Г–і-
–љ–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –і—А—Г–≥–Њ–≥–Њ. –Я—А–Є —В–∞–Ї–Њ–Љ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–Є –Њ–±—Л—З–љ–Њ –Є–Ј–≤–µ—Б—В–љ—Л –Ї—Г—А—Б—Л –Є —Б–Ї–Њ—А–Њ—Б—В–Є –Њ–±–Њ–Є—Е —Б—Г–і–Њ–≤ –Є –і–≤–∞ —А–∞–Ј–љ–Њ–≤—А–µ–Љ–µ–љ–љ—Л–µ —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞. –Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –≤–Ј–∞–Є–Љ–љ–Њ–≥–Њ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ –њ–Њ —Н—В–Є–Љ
–і–∞–љ–љ—Л–Љ –љ–µ –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В –Ј–∞—В—А—Г–і–љ–µ–љ–Є–є.
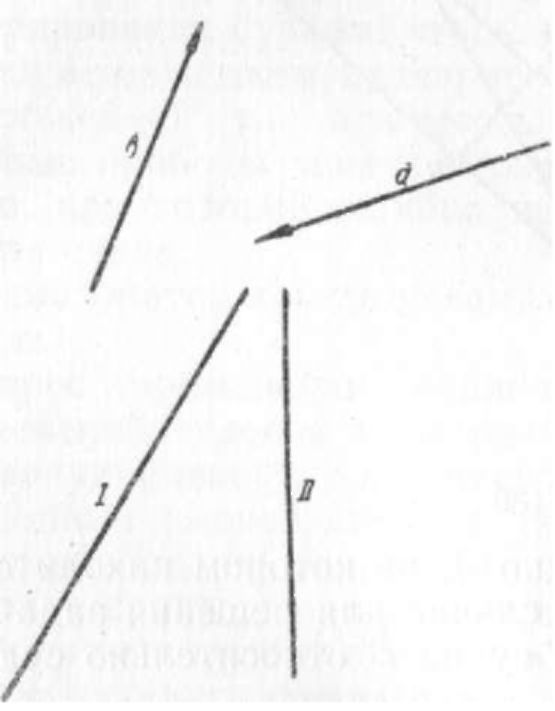
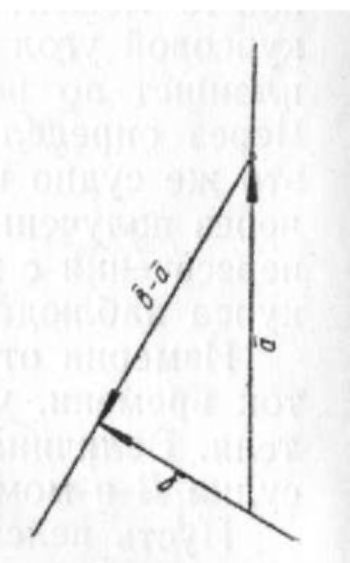
–Я—А–µ–і–њ–Њ–ї–Њ–ґ–Є–Љ, —З—В–Њ –≤–µ–Ї—В–Њ—А—Л –∞ –Є b (—А–Є—Б. 128) –њ—А–µ–і—Б—В–∞–≤–ї—П—О—В —Б–Њ–±–Њ–є —З–∞—Б–Њ–≤—Л–µ —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–Њ–≤ A –Є –Т, –∞ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П I –Є IIвАФ–њ–µ–ї–µ–љ–≥–Є, –≤–Ј—П—В—Л–µ —З–µ—А–µ–Ј –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –≤ –Њ–і–Є–љ —З–∞—Б. –Ґ—А–µ–±—Г–µ—В—Б—П –Њ–њ—А–µ–і–µ–ї–Є—В—М –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—Г–і–Њ–≤ A –Є –Т –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –і—А—Г–≥ –і—А—Г–≥–∞, –≤ –Љ–Њ–Љ–µ–љ—В –≤—В–Њ—А–Њ–≥–Њ –њ–µ–ї–µ–љ–≥–∞.
–†–Є—Б. 130
–Ф–ї—П —Н—В–Њ–≥–Њ —Г—Б–ї–Њ–≤–Є–Љ—Б—П, —З—В–Њ —Б—Г–і–љ–Њ A, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –љ–∞—Е–Њ–і–Є—В—Б—П –љ–∞–±–ї—О–і–∞—В–µ–ї—М, –љ–µ–њ–Њ–і–≤–Є–ґ–љ–Њ. –Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –і–ї—П —А–µ—И–µ–љ–Є—П –Ј–∞–і–∞—З–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –љ–∞–є—В–Є –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞ –Т –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ —Б—Г–і–љ–∞ A.
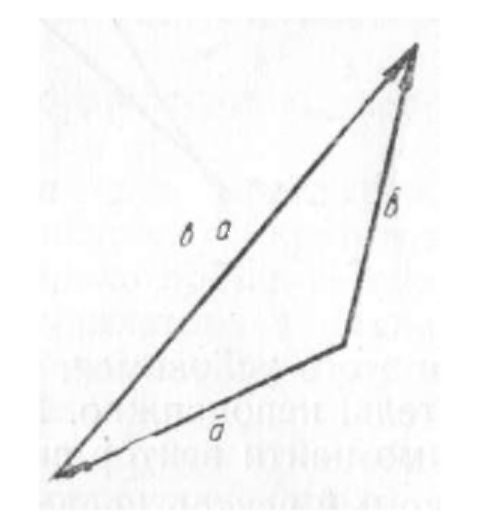
–Ш—Б–Ї–Њ–Љ—Л–є –≤–µ–Ї—В–Њ—А –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є —А–∞–Ј–љ–Њ—Б—В—М –≤–µ–Ї—В–Њ—А–Њ–≤ b –Є –∞,
–Ї–Њ—В–Њ—А–∞—П –ї–µ–≥–Ї–Њ –љ–∞—Е–Њ–і–Є—В—Б—П –њ—А–Њ—Б—В—Л–Љ –≤—Л—З–Є—В–∞–љ–Є–µ–Љ —Н—В–Є—Е –≤–µ–Ї—В–Њ—А–Њ–≤
(—А–Є—Б. 129). –Ъ–Њ–≥–і–∞ –љ–∞–є–і–µ–љ –≤–µ–Ї—В–Њ—А b вАФ –∞ –љ–∞ –ї–Є—Б—В–µ –±—Г–Љ–∞–≥–Є –љ–∞–љ–Њ—Б—П—В
—В–Њ—З–Ї—Г –Є –њ—А–Є–љ–Є–Љ–∞—О—В –µ–µ –Ј–∞ –Љ–µ—Б—В–Њ —Б—Г–і–љ–∞ –Ы. –Ф–∞–ї—М–љ–µ–є—И–µ–µ –њ–Њ—Б—В—А–Њ–µ–љ–Є–µ
–њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—Б—П —В–∞–Ї, –Ї–∞–Ї –њ—А–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–Є –Љ–µ—Б—В–∞ —Б–њ–Њ—Б–Њ–±–Њ–Љ –Ї—А—О–є—Б-
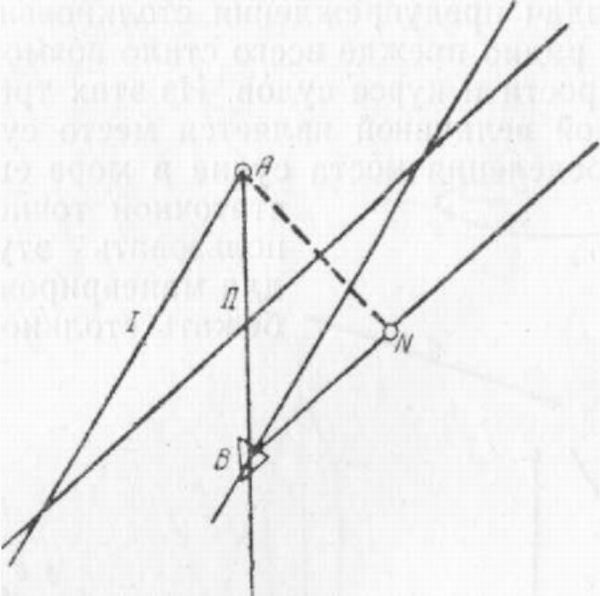
–њ–µ–ї–µ–љ–≥–∞. –Э–µ–Њ–±—Е–Њ–і–Є–Љ—Л–µ –і–ї—П —Н—В–Њ–≥–Њ –њ–Њ—Б—В—А–Њ–µ–љ–Є—П –њ–Њ–Ї–∞–Ј–∞–љ—Л –љ–∞
—А–Є—Б. 130 –Є –њ–Њ—П—Б–љ–µ–љ–Є–є –љ–µ —В—А–µ–±—Г—О—В. –Ґ–Њ—З–Ї–∞ –Т –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є
–Љ–µ—Б—В–Њ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –≤ –Љ–Њ–Љ–µ–љ—В –≤—В–Њ—А–Њ–≥–Њ –њ–µ–ї–µ–љ–≥–∞. –Х—Б–ї–Є —З–µ—А–µ–Ј —В–Њ—З–Ї—Г –Т –њ—А–Њ–≤–µ—Б—В–Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –≤–µ–Ї—В–Њ—А–∞ —Е–∞—А–∞–Ї—В–µ—А–Є–Ј—Г—О—Й–µ–≥–Њ
–Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–µ –і–≤–Є–ґ–µ–љ–Є–µ —Б—Г–і–љ–∞ –Т, –Є –Њ–њ—Г—Б—В–Є—В—М –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А –Є–Ј
—В–Њ—З–Ї–Є A –љ–∞ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ —Н—В–Њ–≥–Њ –≤–µ–Ї—В–Њ—А–∞, —В–Њ –±—Г–і–µ—В –њ–Њ–ї—Г—З–µ–љ–∞ —В–Њ—З–Ї–∞ N, –≤ –Ї–Њ—В–Њ—А–Њ–є —Б—Г–і–љ–Њ –Т –±—Г–і–µ—В –љ–∞—Е–Њ–і–Є—В—М—Б—П –≤ –Љ–Њ–Љ–µ–љ—В –љ–∞–Є–±–Њ–ї—М—И–µ–≥–Њ
—Б–±–ї–Є–ґ–µ–љ–Є—П.
–Я–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ–Њ–є —Б—В–Њ—А–Њ–љ–Њ–є —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–≥–Њ –њ—А–Є–Љ–µ–љ–µ–љ–Є—П —А–∞–і–Є–Њ –Є
—А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–∞ —П–≤–ї—П–µ—В—Б—П —В–Њ, —З—В–Њ –≤—Б–µ —Г–Ї–∞–Ј–∞–љ–љ—Л–µ –≤—Л—И–µ —Б–≤–µ–і–µ–љ–Є—П
–Є -–Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ –њ–Њ–ї—Г—З–Є—В—М –і–∞–ґ–µ –њ—А–Є —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є–Є —Б—Г–і–Њ–≤
–і–∞–ї–µ–Ї–Њ –Ј–∞ –њ—А–µ–і–µ–ї–∞–Љ–Є –≤–Є–і–Є–Љ–Њ—Б—В–Є –і—А—Г–≥ –і—А—Г–≥–∞.
–Э–µ–і–Њ—Б—В–∞—В–Њ–Ї —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —А–∞–і–Є–Њ—Г—Б—В–∞–љ–Њ–≤–Њ–Ї –љ–∞ —Б—Г–і–∞—Е –Ј–∞–Ї–ї—О—З–∞–µ—В—Б—П –≤ —В–Њ–Љ, —З—В–Њ –њ—А–Є —А–∞–±–Њ—В–µ —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–љ–Њ–є —Г—Б—В–∞–љ–Њ–≤–Ї–Є, –љ–µ
–Љ–Њ–ґ–µ—В —А–∞–±–Њ—В–∞—В—М –њ—А–Є–µ–Љ–Њ-–њ–µ—А–µ–і–∞—В–Њ—З–љ–∞—П —Б—В–∞–љ—Ж–Є—П, –Є –љ–∞–Њ–±–Њ—А–Њ—В. –Ґ–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, –њ—А–Њ—Ж–µ—Б—Б –≤–Ј–∞–Є–Љ–љ–Њ–≥–Њ –њ–µ–ї–µ–љ–≥–Њ–≤–∞–љ–Є—П –Ј–∞–љ–Є–Љ–∞–µ—В –і–ї–Є—В–µ–ї—М–љ–Њ–µ –≤—А–µ–Љ—П, —З—В–Њ –≤—Л–Ј—Л–≤–∞–µ—В –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В—М –љ–∞—З–Є–љ–∞—В—М –Њ–њ–µ—А–∞—Ж–Є–Є –њ–Њ
–Њ–њ—А–µ–і–µ–ї–µ–љ–Є—О –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ –Ј–∞–±–ї–∞–≥–Њ–≤—А–µ–Љ–µ–љ–љ–Њ. –Я–Њ–≤—В–Њ—А–љ—Л–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П —В–∞–Ї–ґ–µ –Ј–∞–љ–Є–Љ–∞—О—В –і–ї–Є—В–µ–ї—М–љ–Њ–µ –≤—А–µ–Љ—П. –Я–Њ–і–Њ–±–љ—Л–µ —Г—Б–ї–Њ–≤–Є—П —А–∞–±–Њ—В—Л –њ—А–µ–њ—П—В—Б—В–≤—Г—О—В —И–Є—А–Њ–Ї–Њ–Љ—Г –њ—А–Є–Љ–µ–љ–µ–љ–Є—О —Б–Њ–≤–Љ–µ—Б—В–љ–Њ–є —А–∞–±–Њ—В—Л —А–∞–і–Є–Њ –Є —А–∞–і–Є–Њ–њ–µ–ї–µ–љ–≥–∞—В–Њ—А–∞
–њ—А–Є —А–µ—И–µ–љ–Є–Є –≤–Њ–њ—А–Њ—Б–Њ–≤ –Я–Я–°–°.
–Я—А–Є–Љ–µ–љ–µ–љ–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞. –†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –њ–Њ–Ј–≤–Њ–ї—П–µ—В –µ—Й–µ –±–Њ–ї—М—И–µ –Њ–±–ї–µ–≥—З–Є—В—М —А–µ—И–µ–љ–Є–µ –≤–Њ–њ—А–Њ—Б–Њ–≤, —Б–≤—П–Ј–∞–љ–љ—Л—Е —Б
–њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є–µ–Љ —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ. –≠—В–Њ—В –њ—А–Є–±–Њ—А –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Њ–њ—А–µ–і–µ–ї—П—В—М —Г–≥–ї—Л —Б —В–Њ—З–љ–Њ—Б—В—М—О –і–Њ 1вАФ2¬∞, –∞ —А–∞—Б—Б—В–Њ—П–љ–Є—П —Б
—В–Њ—З–љ–Њ—Б—В—М—О –і–Њ 25вАФ100 –Љ(1). –Ґ–Њ—З–љ–Њ—Б—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Ї–∞–Ї —Г–≥–ї–∞, —В–∞–Ї –Є
—А–∞—Б—Б—В–Њ—П–љ–Є—П –њ–Њ–Ј–≤–Њ–ї—П–µ—В –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М –Є—Е –і–ї—П —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–Є—П –Љ–µ—В–Њ–і–∞
–Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—П —Б—Г–і–љ–Њ–Љ, —З—В–Њ–±—Л –Є–Ј–±–µ–ґ–∞—В—М —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П. –Ф–ї—П –њ–Њ–ї—Г—З–µ–љ–Є—П –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—П —Б—Г–і–∞–Љ–Є —Г–≥–ї—Л –љ–∞–і–Њ –Ј–љ–∞—В—М —Б
—В–Њ—З–љ–Њ—Б—В—М—О 1вАФ2¬∞, —В. –µ. —Б —В–Њ—З–љ–Њ—Б—В—М—О, –Ї–Њ—В–Њ—А—Г—О –і–∞—О—В –≤—Б–µ –Љ–Њ—А—Б–Ї–Є–µ —Г–≥–ї–Њ–Љ–µ—А–љ—Л–µ –њ—А–Є–±–Њ—А—Л —В–Є–њ–∞ –Ї–Њ–Љ–њ–∞—Б–∞; —А–∞—Б—Б—В–Њ—П–љ–Є—П –љ–∞–і–Њ –Ј–љ–∞—В—М —Б —В–Њ—З–љ–Њ—Б—В—М—О, –њ—А–Є –Ї–Њ—В–Њ—А–Њ–є –Њ—И–Є–±–Ї–∞ –љ–µ –њ—А–µ–≤–Њ—Б—Е–Њ–і–Є–ї–∞ –±—Л –љ–∞–Є–±–Њ–ї—М—И–µ–≥–Њ
—А–∞–Ј–Љ–µ—А–∞ —Б—Г–і–љ–∞.
–†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –Ї–∞–Ї –њ–Њ —Г–≥–ї–∞–Љ, —В–∞–Ї –Є –њ–Њ —А–∞—Б—Б—В–Њ—П–љ–Є—О –і–∞–µ—В —В–∞–Ї—Г—О
—В–Њ—З–љ–Њ—Б—В—М.
–Т–Њ–њ—А–Њ—Б –њ—А–Є–Љ–µ–љ–µ–љ–Є—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П
—Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ —А–∞–Ј–±–µ—А–µ–Љ, –Є—Б–њ–Њ–ї—М–Ј—Г—П –Ї—А—Г–≥–Њ–≤—Г—О –Є–ї–Є
—А–∞–і–Є–∞–ї—М–љ—Г—О —А–∞–Ј–≤–µ—А—В–Ї—Г –Ї–∞–Ї –љ–∞–Є–±–Њ–ї–µ–µ —И–Є—А–Њ–Ї–Њ –њ—А–Є–Љ–µ–љ—П–µ–Љ—Г—О –≤ –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞—Е. –≠–Ї—А–∞–љ –Є–љ–і–Є–Ї–∞—В–Њ—А–∞ —Б —А–∞–і–Є–∞–ї—М–љ–Њ–є
—А–∞–Ј–≤–µ—А—В–Ї–Њ–є –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –і–Є—Б–Ї, –≤ —Ж–µ–љ—В—А–µ –Ї–Њ—В–Њ—А–Њ–≥–Њ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ –љ–∞–±–ї—О–і–∞—В–µ–ї—М, —В. –µ. —Б—Г–і–љ–Њ —Б —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ (—А–Є—Б. 131). –Ф–Є—Б–Ї
–њ–Њ –Њ–Ї—А—Г–ґ–љ–Њ—Б—В–Є —А–∞–Ј–±–Є—В –љ–∞ –≥—А–∞–і—Г—Б—Л –Є –і–Њ–ї–Є –≥—А–∞–і—Г—Б–∞ –њ–Њ–і–Њ–±–љ–Њ –∞–Ј–Є–Љ—Г—В–∞–ї—М–љ–Њ–Љ—Г –Ї—А—Г–≥—Г –Ї–Њ–Љ–њ–∞—Б–∞. –Э—Г–ї—М —Н—В–Њ–є –≥—А–∞–і—Г—Б–љ–Њ–є —И–Ї–∞–ї—Л —Б–Њ–≤–њ–∞–і–∞–µ—В —Б –љ–Њ—Б–Њ–≤–Њ–є —З–∞—Б—В—М—О –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є —Б—Г–і–љ–∞ –њ—А–Є —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –∞–љ—В–µ–љ–љ—Л —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –≤ —Н—В–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є —Б—Г–і–љ–∞, –Є–ї–Є
—Б –љ–Њ—Б–Њ–≤–Њ–є —З–∞—Б—В—М—О –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ–є –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, –µ—Б–ї–Є –∞–љ—В–µ–љ–љ–∞ —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–∞ –≤–љ–µ –µ–µ.
–Т—Б–µ –њ—А–µ–і–Љ–µ—В—Л, —Б–њ–Њ—Б–Њ–±–љ—Л–µ –Њ—В—А–∞–ґ–∞—В—М —Н–ї–µ–Ї—В—А–Њ–Љ–∞–≥–љ–Є—В–љ—Л–µ –≤–Њ–ї–љ—Л,
–њ–Њ–ї—Г—З–∞—О—В –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–µ –љ–∞ —Н–Ї—А–∞–љ–µ –Є–љ–і–Є–Ї–∞—В–Њ—А–∞. –Ъ—Г—А—Б–Њ–≤—Л–µ —Г–≥–ї—Л
–Њ—В—Б—З–Є—В—Л–≤–∞—О—В—Б—П –њ–Њ –≥—А–∞–і—Г—Б–љ–Њ–є —И–Ї–∞–ї–µ, –∞ —А–∞—Б—Б—В–Њ—П–љ–Є—П –Њ–њ—А–µ–і–µ–ї—П—О—В—Б—П
–њ—А–Є –њ–Њ–Љ–Њ—Й–Є –Ї–Њ–љ—Ж–µ–љ—В—А–Є—З–µ—Б–Ї–Є—Е –Ї—А—Г–≥–Њ–≤ –∞, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л—Е –і—А—Г–≥
–Њ—В –і—А—Г–≥–∞ –љ–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л—Е —А–∞—Б—Б—В–Њ—П–љ–Є—П—Е.
–Э–∞ —А–Є—Б. 131 –Р–Ю вАФ –љ–Њ—Б–Њ–≤–∞—П —З–∞—Б—В—М –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є
(–Є–ї–Є –њ–ї–Њ—Б–Ї–Њ—Б—В–Є, –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ–є –µ–є). –≠–Ї—А–∞–љ –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є
–њ–Њ–ї—П—А–љ—Г—О —Б–Є—Б—В–µ–Љ—Г –Ї–Њ–Њ—А–і–Є–љ–∞—В. –Я–Њ–ї—О—Б –≤ —В–Њ—З–Ї–µ –Ю, –њ–Њ–ї—П—А–љ–∞—П –Њ—Б—М
OA, –њ–Њ–ї—П—А–љ—Л–є —А–∞–і–Є—Г—Б вАФ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –њ—А–µ–і–Љ–µ—В–∞ –Є –њ–Њ–ї—П—А–љ—Л–є
—Г–≥–Њ–ї вАФ –Ї—Г—А—Б–Њ–≤–Њ–є —Г–≥–Њ–ї.
–Я—А–Є —А–∞–±–Њ—В–µ —Б —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ –њ—А–µ–ґ–і–µ –≤—Б–µ–≥–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–Њ–Љ–∞–љ–Є—В—М, —З—В–Њ —Б—Г–і–љ–Њ, –љ–∞ –Ї–Њ—В–Њ—А–Њ–Љ –љ–∞—Е–Њ–і–Є—В—Б—П –љ–∞–±–ї—О–і–∞—В–µ–ї—М, –љ–µ–њ–Њ–і–≤–Є–ґ–љ–Њ, –∞ –≤—Б–µ –Њ–Ї—А—Г–ґ–∞—О—Й–Є–µ –њ—А–µ–і–Љ–µ—В—Л –і–≤–Є–ґ—Г—В—Б—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –љ–µ–≥–Њ.
–≠—В–Њ –Њ–±—Б—В–Њ—П—В–µ–ї—М—Б—В–≤–Њ —Б –Њ–і–љ–Њ–є —Б—В–Њ—А–Њ–љ—Л —Г–і–Њ–±–љ–Њ —В–µ–Љ, —З—В–Њ –љ–µ —В—А–µ–±—Г–µ—В—Б—П –љ–Є–Ї–∞–Ї–Є—Е –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ—Л—Е –≤—Л—З–Є—Б–ї–µ–љ–Є–є –Є–ї–Є –њ–Њ—Б—В—А–Њ–µ–љ–Є–є, —З—В–Њ–±—Л
—А–µ—И–∞—В—М –Є–љ—В–µ—А–µ—Б—Г—О—Й–Є–µ –Ј–∞–і–∞—З–Є, –љ–Њ —Б –і—А—Г–≥–Њ–є —Б—В–Њ—А–Њ–љ—Л, –Љ–Њ–ґ–µ—В –≤–≤–Њ–і–Є—В—М –≤ –Ј–∞–±–ї—Г–ґ–і–µ–љ–Є–µ –њ—А–Є —Б—Г–ґ–і–µ–љ–Є–Є –Њ –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ—Л—Е —Б–Ї–Њ—А–Њ—Б—В—П—Е
–Є –љ–∞–њ—А–∞–≤–ї–µ–љ–Є—П—Е –љ–∞ –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –Ј–µ–Љ–ї–Є.
–†–Є—Б. 131
–Я—А–Є –њ–Њ–Љ–Њ—Й–Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Љ–Њ–ґ–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М:
1) —А–∞—Б—Б—В–Њ—П–љ–Є–µ, –Ї—Г—А—Б–Њ–≤–Њ–є —Г–≥–Њ–ї, –∞ —В–∞–Ї–ґ–µ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Л–µ –Ї—Г—А—Б
–Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ (–Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–∞—П –њ—А–Њ–Ї–ї–∞–і–Ї–∞);
2) –њ–µ—А–µ—Б–µ–Ї–∞—О—В—Б—П –ї–Є –Ї—Г—А—Б—Л —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ;
3) –≤ –Ї–∞–Ї–Њ–є —В–Њ—З–Ї–µ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ –љ–∞–±–ї—О–і–∞—В–µ–ї—П –њ—А–Њ–Є—Б—Е–Њ–і–Є—В –њ–µ—А–µ—Б–µ—З–µ–љ–Є–µ –Ї—Г—А—Б–Њ–≤ –Є —З–µ—А–µ–Ј –Ї–∞–Ї–Њ–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є;
4) –љ–∞–Є–Љ–µ–љ—М—И–µ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Љ–µ–ґ–і—Г —Б—Г–і–∞–Љ–Є;
5) –±—Г–і–µ—В –ї–Є —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–µ –Є —З–µ—А–µ–Ј –Ї–∞–Ї–Њ–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є;
6) –Є—Б—В–Є–љ–љ—Л–µ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ (–Є—Б—В–Є–љ–љ–∞—П
–њ—А–Њ–Ї–ї–∞–і–Ї–∞);
7) –Ї—Г—А—Б, –Ї–∞–Ї–Є–Љ —Б–ї–µ–і—Г–µ—В –Є–і—В–Є, —З—В–Њ–±—Л –њ—А–Њ–є—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є.
–†–µ—И–µ–љ–Є–µ –њ–Њ—Б—В–∞–≤–ї–µ–љ–љ—Л—Е –Ј–∞–і–∞—З –Љ–Њ–ґ–µ—В –±—Л—В—М –≤—Л–њ–Њ–ї–љ–µ–љ–Њ —А–∞–Ј–ї–Є—З–љ—Л–Љ–Є —Б–њ–Њ—Б–Њ–±–∞–Љ–Є.
–Э–∞—З–љ–µ–Љ —А–∞–Ј–±–Њ—А —Н—В–Є—Е —Б–њ–Њ—Б–Њ–±–Њ–≤ —Б –њ—А–Є–Љ–µ–љ–µ–љ–Є—П –Љ–∞–љ–µ–≤—А–µ–љ–љ–Њ–≥–Њ
–њ–ї–∞–љ—И–µ—В–∞, –Ї–Њ—В–Њ—А—Л–є –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є —В–Њ—З–љ—Г—О –Ї–Њ–њ–Є—О —Н–Ї—А–∞–љ–∞
—Б —А–∞–і–Є–∞–ї—М–љ–Њ–є —А–∞–Ј–≤–µ—А—В–Ї–Њ–є; –њ–Њ—Н—В–Њ–Љ—Г –Љ–Њ–ґ–љ–Њ –≤–Њ—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П
—А–Є—Б. 131.
–Ю—В–љ–Њ—Б–Є—В–µ–ї—М–љ–∞—П –њ—А–Њ–Ї–ї–∞–і–Ї–∞. –Ф–Њ–њ—Г—Б—В–Є–Љ, —З—В–Њ –≤ –Ї–∞–Ї–Њ–є-—В–Њ –Љ–Њ–Љ–µ–љ—В –≤—А–µ–Љ–µ–љ–Є –Љ—Л –Њ–±–љ–∞—А—Г–ґ–Є–ї–Є —Б—Г–і–љ–Њ –Т. –Ю–њ—А–µ–і–µ–ї—П–µ–Љ
–Ї—Г—А—Б–Њ–≤–Њ–є —Г–≥–Њ–ї –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –љ–µ–≥–Њ. –Э–∞–љ–Њ—Б–Є–Љ –љ–∞ –Љ–∞–љ–µ–≤—А–µ–љ–љ—Л–є
–њ–ї–∞–љ—И–µ—В –њ–Њ –њ–Њ–ї—Г—З–µ–љ–љ—Л–Љ –і–∞–љ–љ—Л–Љ –Љ–µ—Б—В–Њ —Б—Г–і–љ–∞ –Т (—В–Њ—З–Ї–∞ –Т¹).
–І–µ—А–µ–Ј –Њ–њ—А–µ–і–µ–ї–µ–љ–љ—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –≤—В–Њ—А–Є—З–љ–Њ –њ–µ–ї–µ–љ–≥—Г–µ–Љ
—Н—В–Њ –ґ–µ —Б—Г–і–љ–Њ –Є –љ–∞–љ–Њ—Б–Є–Љ –µ–≥–Њ –љ–∞ –њ–ї–∞–љ—И–µ—В (—В–Њ—З–Ї–∞ –Т²). –Я—А–Њ–≤–Њ–і–Є–Љ
—З–µ—А–µ–Ј –њ–Њ–ї—Г—З–µ–љ–љ—Л–µ —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ —В–Њ—З–Ї–Є –њ—А—П–Љ—Г—О –ї–Є–љ–Є—О –Т¹–Т² –і–Њ
–њ–µ—А–µ—Б–µ—З–µ–љ–Є—П —Б –њ—А—П–Љ–Њ–є OA. –Ґ–Њ—З–Ї–∞ –Т³ –њ–Њ–Ї–∞–ґ–µ—В –Љ–µ—Б—В–Њ –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П
–Ї—Г—А—Б–∞ –љ–∞–±–ї—О–і–∞—В–µ–ї—П —Б—Г–і–љ–Њ–Љ –Т.
–Ш–Ј–Љ–µ—А–Є–≤ –Њ—В—А–µ–Ј–Ї–Њ–Љ –Т¹–Т² —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Т²–Т–Ј, –њ–Њ–ї—Г—З–Є–Љ –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є, —З–µ—А–µ–Ј –Ї–Њ—В–Њ—А—Л–є —Б—Г–і–љ–Њ –Т –њ–µ—А–µ—Б–µ—З–µ—В –Ї—Г—А—Б –љ–∞–±–ї—О–і–∞—В–µ–ї—П. –Т–µ–ї–Є—З–Є–љ–∞ –Ю–Т² –Њ–њ—А–µ–і–µ–ї—П–µ—В —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Њ—В –љ–∞–±–ї—О–і–∞—В–µ–ї—П –і–Њ
—Б—Г–і–љ–∞ –Т –≤ –Љ–Њ–Љ–µ–љ—В –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П –Ї—Г—А—Б–∞ —Б—Г–і–љ–∞ –Р.
–Я—Г—Б—В—М –њ–µ–ї–µ–љ–≥–Њ–≤–∞–ї–Є —Б—Г–і–љ–Њ –°, –Њ–њ—А–µ–і–µ–ї–Є–ї–Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –љ–µ–≥–Њ
–Є –љ–∞–љ–µ—Б–ї–Є –µ–≥–Њ –Љ–µ—Б—В–Њ –љ–∞ –Љ–∞–љ–µ–≤—А–µ–љ–љ—Л–є –њ–ї–∞–љ—И–µ—В –≤ —В–Њ—З–Ї–µ –°¹.
–І–µ—А–µ–Ј –љ–µ–Ї–Њ—В–Њ—А–Њ–µ –≤—А–µ–Љ—П, –≤–Ј—П–≤ –≤—В–Њ—А–Њ–є –њ–µ–ї–µ–љ–≥ —Б—Г–і–љ–∞ –° –Є –Њ–њ—П—В—М
–Њ–њ—А–µ–і–µ–ї–Є–≤ –і–Њ –љ–µ–≥–Њ —А–∞—Б—Б—В–Њ—П–љ–Є–µ, –њ–Њ–ї—Г—З–Є–Љ, —З—В–Њ –њ–µ–ї–µ–љ–≥ –љ–µ –Є–Ј–Љ–µ–љ–Є–ї—Б—П,
–∞ —А–∞—Б—Б—В–Њ—П–љ–Є–µ —Г–Љ–µ–љ—М—И–Є–ї–Њ—Б—М (—В–Њ—З–Ї–∞ –°²). –Я–Њ–ї–Њ–ґ–µ–љ–Є–µ –≤—В–Њ—А–Њ–є —В–Њ—З–Ї–Є
—Б—Г–і–љ–∞ –° –њ–Њ–Ї–∞–Ј—Л–≤–∞–µ—В, —З—В–Њ –µ–≥–Њ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Л–є –Ї—Г—А—Б –≤–µ–і–µ—В –≤ —Ж–µ–љ—В—А,
–∞ —Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ, —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–µ –љ–µ–Є–Ј–±–µ–ґ–љ–Њ –Є –љ–∞—Б—В—Г–њ–Є—В –Њ–љ–Њ —З–µ—А–µ–Ј
–њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є, –Ї–Њ—В–Њ—А—Л–є –ї–µ–≥–Ї–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М, –µ—Б–ї–Є –Њ—В—А–µ–Ј–Ї–Њ–Љ
–°¹–°² –Є–Ј–Љ–µ—А–Є—В—М –Њ—В—А–µ–Ј–Њ–Ї –Ю–°².
–Я—Г—Б—В—М –і–∞–ї–µ–µ –Ј–∞–њ–µ–ї–µ–љ–≥–Њ–≤–∞–ї–Є –Є –Њ–њ—А–µ–і–µ–ї–Є–ї–Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Б—Г–і–љ–∞ D. –І–µ—А–µ–Ј –љ–µ–Ї–Њ—В–Њ—А—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є —Б–љ–Њ–≤–∞ –Њ–њ—А–µ–і–µ–ї–Є–ї–Є
–Є –њ–µ–ї–µ–љ–≥, –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞. –Я—А–Є —Н—В–Њ–Љ –Њ–Ї–∞–Ј–∞–ї–Њ—Б—М, —З—В–Њ
–љ–Є –њ–µ–ї–µ–љ–≥, –љ–Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ –љ–µ –Є–Ј–Љ–µ–љ–Є–ї–Є—Б—М. –Ґ–∞–Ї–Њ–µ –Њ–±—Б—В–Њ—П—В–µ–ї—М—Б—В–≤–Њ
–Љ–Њ–ґ–µ—В –±—Л—В—М –ї–Є—И—М –≤ —В–Њ–Љ —Б–ї—Г—З–∞–µ, –Ї–Њ–≥–і–∞ —Б—Г–і–љ–Њ D –Є–і–µ—В –њ–∞—А–∞–ї–ї–µ–ї—М–љ—Л–Љ –Ї—Г—А—Б–Њ–Љ —Б –љ–∞–±–ї—О–і–∞—В–µ–ї–µ–Љ –Є –Є–Љ–µ–µ—В —В–∞–Ї—Г—О –ґ–µ —Б–Ї–Њ—А–Њ—Б—В—М, –Ї–∞–Ї
–Є –љ–∞–±–ї—О–і–∞—В–µ–ї—М.
–Ъ–Њ–≥–і–∞ –≤ —А–∞—Б–њ–Њ—А—П–ґ–µ–љ–Є–Є —Б—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—П –љ–µ—В –Љ–∞–љ–µ–≤—А–µ–љ–љ–Њ–≥–Њ –њ–ї–∞–љ—И–µ—В–∞, —В–µ –ґ–µ –Ј–∞–і–∞—З–Є –Љ–Њ–≥—Г—В –±—Л—В—М —А–µ—И–µ–љ—Л –Љ–µ—В–Њ–і–Њ–Љ –њ–µ–ї–µ–љ–≥–Њ–≤ –Є —А–∞—Б—Б—В–Њ—П–љ–Є–є. –Ф–ї—П —Н—В–Њ–≥–Њ –љ–∞ –Њ—В–і–µ–ї—М–љ–Њ–Љ –ї–Є—Б—В–µ –±—Г–Љ–∞–≥–Є (—А–Є—Б. 132) –љ–∞–љ–Њ—Б—П—В —В–Њ—З–Ї—Г –Ю –Є –њ—А–Њ–≤–Њ–і—П—В –≤–µ—А—В–Є–Ї–∞–ї—М–љ—Г—О –њ—А—П–Љ—Г—О OA. –Я—Г—Б—В—М
—Н—В–∞ –ї–Є–љ–Є—П –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Б–Њ–±–Њ–є –љ–Њ—Б–Њ–≤—Г—О —З–∞—Б—В—М –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є
–њ–ї–Њ—Б–Ї–Њ—Б—В–Є —Б—Г–і–љ–∞. –Х—Б–ї–Є –љ–∞ —Н–Ї—А–∞–љ–µ –Є–љ–і–Є–Ї–∞—В–Њ—А–∞ –њ–Њ—П–≤–Є–ї–Њ—Б—М –Ї–∞–Ї–Њ–µ-
–ї–Є–±–Њ —Б—Г–і–љ–Њ –Т, —В–Њ –Њ–њ—А–µ–і–µ–ї–Є–≤ –µ–≥–Њ –Ї—Г—А—Б–Њ–≤–Њ–є —Г–≥–Њ–ї –Є —А–∞—Б—Б—В–Њ—П–љ–Є–µ
–і–Њ –љ–µ–≥–Њ, –љ–∞–љ–Њ—Б–Є–Љ –љ–∞ –±—Г–Љ–∞–≥–µ —В–Њ—З–Ї—Г –Т¹ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й—Г—О —Н—В–Њ–Љ—Г
–љ–∞–±–ї—О–і–µ–љ–Є—О. –І–µ—А–µ–Ј –љ–µ–Ї–Њ—В–Њ—А—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є —Б–љ–Њ–≤–∞ –Њ–њ—А–µ
–і–µ–ї—П–µ–Љ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—Г–і–љ–∞ –Т (—В–Њ—З–Ї–∞ –Т²). –Я—А–Њ–≤–µ–і—П –њ—А—П–Љ—Г—О –ї–Є–љ–Є—О
—З–µ—А–µ–Ј —В–Њ—З–Ї–Є –Т¹ –Є –Т² –і–Њ –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П —Б –њ—А—П–Љ–Њ–є OA, –њ–Њ–ї—Г—З–Є–Љ —В–Њ—З–Ї—Г –Т³, –≤ –Ї–Њ—В–Њ—А–Њ–є —Б—Г–і–љ–Њ –Т –њ–µ—А–µ—Б–µ—З–µ—В –Ї—Г—А—Б –љ–∞–±–ї—О–і–∞—В–µ–ї—П. –Ф–∞–ї–µ–µ
–љ–µ—В—А—Г–і–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Н—В–Њ–є —В–Њ—З–Ї–Є. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –Њ–њ—Г—Б—В–Є–≤ –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А –Є–Ј —В–Њ—З–Ї–Є –Ю –љ–∞ –њ—А—П–Љ—Г—О B¹B², –Њ–њ—А–µ–і–µ–ї–Є–Љ
–Љ–µ—Б—В–Њ —Б—Г–і–љ–∞ –Т (—В–Њ—З–Ї–∞ N) –≤ –Љ–Њ–Љ–µ–љ—В –љ–∞–Є–±–Њ–ї—М—И–µ–≥–Њ —Б–±–ї–Є–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ –Є –≤–µ–ї–Є—З–Є–љ—Г —Н—В–Њ–≥–Њ —Б–±–ї–Є–ґ–µ–љ–Є—П.
–Ш—Б—В–Є–љ–љ–∞—П –њ—А–Њ–Ї–ї–∞–і–Ї–∞. –Х—Б–ї–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Ј–љ–∞—В—М –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ—Л–µ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, —В–Њ –љ—Г–ґ–љ–Њ
—Б–ї–Њ–ґ–Є—В—М –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞—В–µ–ї—П —Б –≤–µ–Ї—В–Њ—А–Њ–Љ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.

–†–Є—Б. 132

–†–Є—Б. 133
–†–Є—Б. 134
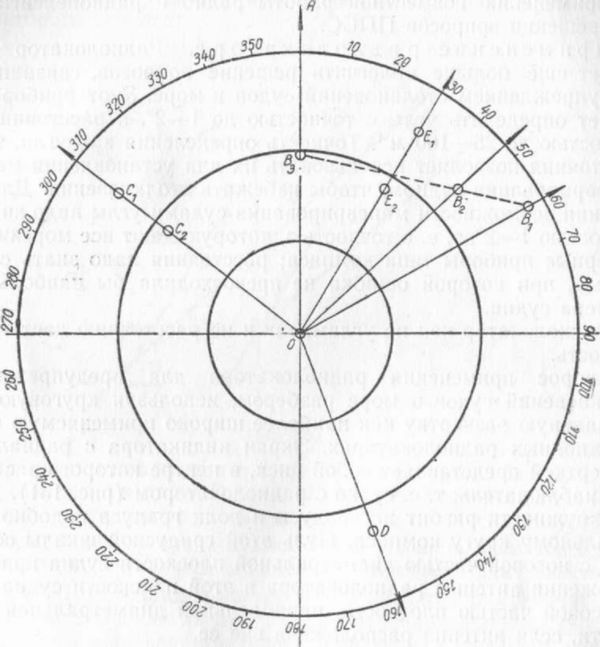
–Ю–њ—А–µ–і–µ–ї–Є–Љ –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ—Г—О —Б–Ї–Њ—А–Њ—Б—В—М –Є –Ї—Г—А—Б —Б—Г–і–љ–∞ –°, –Ї–Њ—В–Њ—А–Њ–µ,
—Б–Њ–≥–ї–∞—Б–љ–Њ –љ–∞–±–ї—О–і–µ–љ–Є—П–Љ –љ–∞ —Н–Ї—А–∞–љ–µ –Є–љ–і–Є–Ї–∞—В–Њ—А–∞, –Є–і–µ—В –Ї—Г—А—Б–Њ–Љ, –≤–µ–і—Г—Й–Є–Љ –Ї —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—О (—Б–Љ. —А–Є—Б. 131). –≠—В–Њ —Б—Г–і–љ–Њ —А–∞—Б–њ–Њ–ї–∞–≥–∞–µ—В—Б—П
—Б–ї–µ–≤–∞ –њ–Њ–і —Г–≥–ї–Њ–Љ –°¹–Ю–Р, —В. –µ. –Њ–Ї–Њ–ї–Њ 53¬∞. –Я—А–µ–і–њ–Њ–ї–Њ–ґ–Є–Љ, —З—В–Њ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–∞—П —З–∞—Б–Њ–≤–∞—П —Б–Ї–Њ—А–Њ—Б—В—М —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞ –±—Г–і–µ—В –≤—Л—А–∞–ґ–∞—В—М—Б—П –Њ—В—А–µ–Ј–Ї–Њ–Љ 2 –°¹–°², –Ї—Г—А—Б –љ–∞–±–ї—О–і–∞—В–µ–ї—П 0¬∞, –∞ –µ–≥–Њ —Б–Ї–Њ—А–Њ—Б—В—М —А–∞–≤–љ–∞ 2,5 –°¹–°²
–Ф–µ–ї–∞–µ–Љ –њ–Њ—Б—В—А–Њ–µ–љ–Є–µ, –њ–Њ–Ї–∞–Ј–∞–љ–љ–Њ–µ –љ–∞ —А–Є—Б. 133. –Э–∞ —Н—В–Њ–Љ —А–Є—Б—Г–љ–Ї–µ –≤–µ–Ї—В–Њ—А –∞ вАФ —Б–Ї–Њ—А–Њ—Б—В—М –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П, –≤–µ–Ї—В–Њ—А –≤вАФ–∞ вАФ —Б–Ї–Њ—А–Њ—Б—В—М –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і.
–љ–∞ –° –Є –≤–µ–Ї—В–Њ—А –≤ вАФ —Б–Ї–Њ—А–Њ—Б—В—М –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–љ–∞ –°.
–Ъ—Г—А—Б —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞ –Њ–Ї–Њ–ї–Њ 51¬∞, –∞ –µ–≥–Њ —Б–Ї–Њ—А–Њ—Б—В—М –њ—А–Є–Љ–µ—А–љ–Њ —А–∞–≤–љ–∞
2,1 –°¹–°² –Т—Л—И–µ —А–∞–Ј–Њ–±—А–∞–љ —Б–ї—Г—З–∞–є —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П, –Ї–Њ–≥–і–∞ –њ–Њ –Я—А–∞–≤–Є–ї—Г
19 —Б—Г–і–љ–Њ –° –і–Њ–ї–ґ–љ–Њ —Г—Б—В—Г–њ–Є—В—М –і–Њ—А–Њ–≥—Г —Б—Г–і–љ—Г-–љ–∞–±–ї—О–і–∞—В–µ–ї—О.
–†–∞–Ј–±–µ—А–µ–Љ –µ—Й–µ –Њ–і–Є–љ —Б–ї—Г—З–∞–є, –Ї–Њ–≥–і–∞ —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М —Б–Њ–≥–ї–∞—Б–љ–Њ —В–Њ–Љ—Г –ґ–µ –Я—А–∞–≤–Є–ї—Г –і–Њ–ї–ґ–љ–Њ —Г—Б—В—Г–њ–Є—В—М –і–Њ—А–Њ–≥—Г –і—А—Г–≥–Њ–Љ—Г —Б—Г–і–љ—Г E
(—Б–Љ. —А–Є—Б. 131).
–Т –Љ–Њ–Љ–µ–љ—В –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П —Б—Г–і–љ–∞ –Х –±–µ—А–µ–Љ –њ–µ–ї–µ–љ–≥ –љ–∞ —Н—В–Њ —Б—Г–і–љ–Њ
–Є –Њ–њ—А–µ–і–µ–ї—П–µ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ –љ–µ–≥–Њ. –Э–∞–љ–µ—Б—П –љ–∞ –Љ–∞–љ–µ–≤—А–µ–љ–љ—Л–є –њ–ї–∞–љ—И–µ—В –њ–µ—А–≤–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—Г–і–љ–∞ –Х, –Њ–±–Њ–Ј–љ–∞—З–∞–µ–Љ –µ–≥–Њ –±—Г–Ї–≤–Њ–є –Х¹. –І–µ—А–µ–Ј
–љ–µ–Ї–Њ—В–Њ—А—Л–є –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є –±–µ—А–µ–Љ –≤—В–Њ—А–Њ–є –њ–µ–ї–µ–љ–≥ –Є —Б–љ–Њ–≤–∞
–Њ–њ—А–µ–і–µ–ї—П–µ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ —Б—Г–і–љ–∞ –Х. –Я—Г—Б—В—М –љ–Њ–≤–Њ–µ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞ –Њ–Ї–∞–Ј—Л–≤–∞–µ—В—Б—П –≤ —В–Њ—З–Ї–µ –Х² –Є –µ–≥–Њ —З–∞—Б–Њ–≤–∞—П —Б–Ї–Њ—А–Њ—Б—В—М 2 E¹E²
–Э–∞ —А–Є—Б. 134 –њ–Њ–Ї–∞–Ј–∞–љ–Њ –њ–Њ—Б—В—А–Њ–µ–љ–Є–µ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Є—Б—В–Є–љ–љ–Њ–≥–Њ
–Ї—Г—А—Б–∞ –Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞ –Х. –Ш–Ј —А–Є—Б—Г–љ–Ї–∞ –≤–Є–і–љ–Њ, —З—В–Њ –Ї—Г—А—Б —А–∞–≤–µ–љ
303¬∞, –∞ —Б–Ї–Њ—А–Њ—Б—В—М вАФ –Њ–Ї–Њ–ї–Њ 0,6 E¹E².

–†–Є—Б. 135
–Ю–њ—А–µ–і–µ–ї–µ–љ–Є–µ –Ї—Г—А—Б–∞, –Ї–∞–Ї–Є–Љ —Б–ї–µ–і—Г–µ—В –њ—А–∞–≤–Є—В—М,
—З—В–Њ–±—Л –њ—А–Њ–є—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ
—А–∞—Б—Б—В–Њ—П–љ–Є–Є (—А–Є—Б 135). –Я—А–µ–і–њ–Њ–ї–Њ–ґ–Є–Љ, —З—В–Њ –Ї—Г—А—Б —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П —А–∞–≤–µ–љ 0¬∞, –Р²–Т¹ вАФ –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П, rвАФ
—А–∞—Б—Б—В–Њ—П–љ–Є–µ, –≤ –Ї–Њ—В–Њ—А–Њ–Љ –ґ–µ–ї–∞—О—В –њ—А–Њ–є—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ,
–Т¹–Т² вАФ –≤–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞
–і–Њ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –≤–µ–Ї—В–Њ—А–∞ —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П, t вАФ –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є, —З–µ—А–µ–Ј –Ї–Њ—В–Њ—А—Л–є –±–µ—А—Г—В—Б—П –њ–µ–ї–µ–љ–≥–Є (–њ—А–Є–љ–Є–Љ–∞–µ–Љ –µ–≥–Њ
–њ–Њ—Б—В–Њ—П–љ–љ—Л–Љ –і–ї—П –≤—Б–µ–є –Ј–∞–і–∞—З–Є). –Э–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –і–≤–Є–ґ–µ—В—Б—П,
–љ–µ –Љ–µ–љ—П—П –љ–Є –Ї—Г—А—Б–∞, –љ–Є —Б–Ї–Њ—А–Њ—Б—В–Є —Б–≤–Њ–µ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П. –Ю–њ—А–µ–і–µ–ї–Є–Љ:
1) –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –і–ї—П —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б
–љ–∞–±–ї—О–і–∞–µ–Љ—Л–Љ —Б—Г–і–љ–Њ–Љ –≤ —А–∞—Б—Б—В–Њ—П–љ–Є–Є r;
2) –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Л–µ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –њ—А–Є
–њ–Њ–і–Њ–±–љ–Њ–Љ –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П.
–Т—Б–µ –њ–Њ—Б—В—А–Њ–µ–љ–Є–µ –≤—Л–њ–Њ–ї–љ—П–µ–Љ –љ–∞ –Љ–∞–љ–µ–≤—А–µ–љ–љ–Њ–Љ –њ–ї–∞–љ—И–µ—В–µ –і–ї—П
–Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є –њ—А–Њ–Ї–ї–∞–і–Ї–Є. –¶–µ–љ—В—А –њ–ї–∞–љ—И–µ—В–∞ –Њ–±–Њ–Ј–љ–∞—З–∞–µ–Љ –±—Г–Ї–≤–Њ–є
–Р¹. –Ш–Ј —Н—В–Њ–≥–Њ —Ж–µ–љ—В—А–∞ —А–∞–і–Є—Г—Б–Њ–Љ, —А–∞–≤–љ—Л–Љ —А–∞—Б—Б—В–Њ—П–љ–Є—О r, –Њ–њ–Є—Б—Л–≤–∞–µ–Љ –Њ–Ї—А—Г–ґ–љ–Њ—Б—В—М.
–Ю–њ—А–µ–і–µ–ї—П–µ–Љ –≤–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ
—Б—Г–і–љ–∞. –Ф–ї—П —Н—В–Њ–≥–Њ –њ–µ–ї–µ–љ–≥—Г–µ–Љ –≤ –Ї–∞–Ї–Њ–є-—В–Њ –Љ–Њ–Љ–µ–љ—В —Н—Е–Њ-—Б–Є–≥–љ–∞–ї –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, –љ–∞–љ–Њ—Б–Є–Љ –Љ–µ—Б—В–Њ —Н—В–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–∞ –њ–ї–∞–љ—И–µ—В –Є –Њ–±–Њ–Ј–љ–∞—З–∞–µ–Љ –њ–Њ–ї—Г—З–µ–љ–љ—Г—О —В–Њ—З–Ї—Г –±—Г–Ї–≤–Њ–є –Т¹. –І–µ—А–µ–Ј –њ—А–Њ–Љ–µ–ґ—Г—В–Њ–Ї –≤—А–µ–Љ–µ–љ–Є, —А–∞–≤–љ—Л–є t, –њ—А–Њ–Є–Ј–≤–Њ–і–Є–Љ –≤—В–Њ—А–Њ–µ –љ–∞–±–ї—О–і–µ–љ–Є–µ; –њ–Њ–ї—Г—З–µ–љ–љ—Г—О —В–Њ—З–Ї—Г
–Њ–±–Њ–Ј–љ–∞—З–∞–µ–Љ –±—Г–Ї–≤–Њ–є –Т². –Т–µ–Ї—В–Њ—А –Т¹–Т² –Є –±—Г–і–µ—В –Є—Б–Ї–Њ–Љ—Л–Љ –≤–µ–Ї—В–Њ—А–Њ–Љ
–Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Т.
–Ю–њ—А–µ–і–µ–ї—П–µ–Љ –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є –Є—Б—В–Є–љ–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Т. –Ф–ї—П —Н—В–Њ–≥–Њ —Б–Ї–ї–∞–і—Л–≤–∞–µ–Љ –≤–µ–Ї—В–Њ—А –Т¹–Т² —Б –≤–µ–Ї—В–Њ—А–Њ–Љ
A²B¹. –°—Г–Љ–Љ–∞ —Н—В–Є—Е –≤–µ–Ї—В–Њ—А–Њ–≤ –Є –і–∞—Б—В –Є—Б–Ї–Њ–Љ—Л–є –≤–µ–Ї—В–Њ—А –Р²–Т² –Є—Б—В–Є–љ–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.
–Э–∞—Е–Њ–і–Є–Љ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –і–ї—П —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б –љ–∞–±–ї—О–і–∞–µ–Љ—Л–Љ —Б—Г–і–љ–Њ–Љ –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є r (–њ–Њ–≤–Њ—А–Њ—В
–њ—А–µ–і–њ–Њ–ї–∞–≥–∞–µ—В—Б—П –њ—А–Њ–Є–Ј–≤–µ—Б—В–Є —З–µ—А–µ–Ј –≤—А–µ–Љ—П t –њ–Њ—Б–ї–µ –≤—В–Њ—А–Њ–≥–Њ –љ–∞–±–ї—О–і–µ–љ–Є—П). –Э–∞–љ–Њ—Б–Є–Љ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Т –≤ –Љ–Њ–Љ–µ–љ—В
–њ–Њ–≤–Њ—А–Њ—В–∞ —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –Р. –Ф–ї—П —Н—В–Њ–≥–Њ –љ–∞ –ї–Є–љ–Є–Є –Т¹–Т² –Њ—В–Ї–ї–∞–і—Л–≤–∞–µ–Љ –≤ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–Є –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–љ–∞ –Т –Њ—В—А–µ–Ј–Њ–Ї, —А–∞–≤–љ—Л–є –Т¹–Т².
–Я–Њ–ї—Г—З–∞–µ–Љ, —В–∞–Ї–Є–Љ –Њ–±—А–∞–Ј–Њ–Љ, —В–Њ—З–Ї—Г –Т³, —З–µ—А–µ–Ј –Ї–Њ—В–Њ—А—Г—О –њ—А–Њ–≤–Њ–і–Є–Љ –Ї–∞—Б–∞—В–µ–ї—М–љ—Г—О –Ї –Њ–Ї—А—Г–ґ–љ–Њ—Б—В–Є, –Њ–њ–Є—Б–∞–љ–љ–Њ–є –Њ–Ї–Њ–ї–Њ —В–Њ—З–Ї–Є –Р¹ —А–∞–і–Є—Г—Б–Њ–Љ,
—А–∞–≤–љ—Л–Љ —А–∞—Б—Б—В–Њ—П–љ–Є—О r. –Ґ–Њ—З–Ї—Г –Ї–∞—Б–∞–љ–Є—П –Њ–±–Њ–Ј–љ–∞—З–Є–Љ –Ґ¹. –Ф–∞–ї–µ–µ –≤ —В–Њ—З–Ї–µ B³ —Б—В—А–Њ–Є–Љ –≤–µ–Ї—В–Њ—А –Є—Б—В–Є–љ–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є A³–Т³ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Т. –Т —Н—В–Њ–є —Б—В–∞–і–Є–Є –њ–Њ—Б—В—А–Њ–µ–љ–Є—П –Є–Ј–≤–µ—Б—В–љ—Л: –≤–µ–Ї—В–Њ—А –Є—Б—В–Є–љ–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Є –ї–Є–љ–Є—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –µ–≥–Њ –њ—Г—В–Є –Т³–Ґ¹.
–Я–Њ —Н—В–Є–Љ –і–≤—Г–Љ –Є–Ј–≤–µ—Б—В–љ—Л–Љ –≤–µ–ї–Є—З–Є–љ–∞–Љ –љ–∞–і–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М –≤–µ–Ї—В–Њ—А
—Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П A, –∞ —В–∞–Ї–ґ–µ –љ–∞–њ—А–∞–≤–ї–µ–љ–Є–µ –Є –≤–µ–ї–Є—З–Є–љ—Г –≤–µ–Ї—В–Њ—А–∞ –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Т –љ–∞
–љ–Њ–≤–Њ–Љ –Ї—Г—А—Б–µ —Б—Г–і–љ–∞ –Р.
–Т –Њ–±—Й–µ–Љ —Б–ї—Г—З–∞–µ –і–ї—П –Њ—Б—Г—Й–µ—Б—В–≤–ї–µ–љ–Є—П —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б—Г–і–Њ–≤ –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є –і–ї—П —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ: 1) –Є–Ј–Љ–µ–љ–Є—В—М —В–Њ–ї—М–Ї–Њ —Б–≤–Њ–є –Ї—Г—А—Б, 2) –Є–Ј–Љ–µ–љ–Є—В—М —В–Њ–ї—М–Ї–Њ —Б–≤–Њ—О —Б–Ї–Њ—А–Њ—Б—В—М –Є
3) –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Є–Ј–Љ–µ–љ–Є—В—М —Б–≤–Њ–є –Ї—Г—А—Б –Є —Б–≤–Њ—О —Б–Ї–Њ—А–Њ—Б—В—М.
–†–µ—И–Є–Љ –љ–∞—И—Г –Ј–∞–і–∞—З—Г –≤ –њ—А–µ–і–њ–Њ–ї–Њ–ґ–µ–љ–Є–Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П —В–Њ–ї—М–Ї–Њ
–Ї—Г—А—Б–∞: —Б–Ї–Њ—А–Њ—Б—В—М –Њ—Б—В–∞–µ—В—Б—П –њ—А–µ–ґ–љ–µ–є.
–Ш–Ј —В–Њ—З–Ї–Є A³ –љ–∞—З–∞–ї–∞ –≤–µ–Ї—В–Њ—А–∞ –Є—Б—В–Є–љ–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ
—Б—Г–і–љ–∞ —А–∞–і–Є—Г—Б–Њ–Љ, —А–∞–≤–љ—Л–Љ —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П, –Њ–њ–Є—Б—Л–≤–∞–µ–Љ –Њ–Ї—А—Г–ґ–љ–Њ—Б—В—М, –Ї–Њ—В–Њ—А–∞—П –њ–µ—А–µ—Б–µ—З–µ—В –ї–Є–љ–Є—О –Т –Ґ³ –≤ —В–Њ—З–Ї–∞—Е –Ъ'¹ –Є –Ъ".
–°–Њ–µ–і–Є–љ—П–µ–Љ —Н—В–Є —В–Њ—З–Ї–Є —Б —В–Њ—З–Ї–Њ–є A³. –Т–µ–Ї—В–Њ—А—Л –Р³–Ъ' –Є –Р³–Ъ" –±—Г–і—Г—В
–њ—А–µ–і—Б—В–∞–≤–ї—П—В—М —Б–Њ–±–Њ–є –≤–Њ–Ј–Љ–Њ–ґ–љ—Л–µ –Ї—Г—А—Б—Л —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П, –љ–∞ –Ї–Њ—В–Њ—А—Л—Е —Б—Г–і–∞ —А–∞–Ј–Њ–є–і—Г—В—Б—П –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є.
–Ф–ї—П –≤—Л—П—Б–љ–µ–љ–Є—П –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ —Б–ї–µ–і—Г–µ—В –љ–∞–є—В–Є
–≤–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Ф–ї—П —Н—В–Њ–є
—Ж–µ–ї–Є –Є–Ј –≤–µ–Ї—В–Њ—А–∞ –Є—Б—В–Є–љ–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–∞–і–Њ –≤—Л—З–µ—Б—В—М –≤–µ–Ї—В–Њ—А —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П.
–Х—Б–ї–Є —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М –ї—П–ґ–µ—В –љ–∞ –Ї—Г—А—Б –Р³–Ъ', —В–Њ –≤–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –±—Г–і–µ—В –Ъ'–Т³ –∞ –µ—Б–ї–Є —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М –ї—П–ґ–µ—В –љ–∞ –Ї—Г—А—Б –Р³–Ъ'' —В–Њ —А–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є
—Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –±—Г–і–µ—В –Ъ"–Т³. –Т –њ–µ—А–≤–Њ–Љ —Б–ї—Г—З–∞–µ
—Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М –±—Г–і–µ—В –Њ–±–≥–Њ–љ—П—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –Є–і—П —А–∞—Б—Е–Њ–і—П—Й–Є–Љ—Б—П –Ї—Г—А—Б–Њ–Љ. –Т–Њ –≤—В–Њ—А–Њ–Љ —Б–ї—Г—З–∞–µ —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М –њ–Њ–є–і–µ—В
–њ–Њ–і –Ї–Њ—А–Љ—Г –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –Є –њ—А–Њ—Ж–µ—Б—Б —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б—Г–і–Њ–≤
–±—Г–і–µ—В —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Њ–≤–∞—В—М –њ—А–∞–≤–Є–ї—М–љ–Њ–Љ—Г –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—О –њ—А–Є —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є–Є —Б—Г–і–Њ–≤ –і—А—Г–≥ —Б –і—А—Г–≥–Њ–Љ. –Ю—З–µ–≤–Є–і–љ–Њ, –≤—В–Њ—А–Њ–є –њ–Њ–≤–Њ—А–Њ—В –ї—Г—З—И–µ
–†–Є—Б. 136
–†–µ—И–Є–Љ —Н—В—Г –ґ–µ –Ј–∞–і–∞—З—Г –Є–Ј–Љ–µ–љ–µ–љ–Є–µ–Љ —В–Њ–ї—М–Ї–Њ —Б–Ї–Њ—А–Њ—Б—В–Є —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П: –Ї—Г—А—Б –Њ—Б—В–∞–µ—В—Б—П –њ—А–µ–ґ–љ–Є–Љ.
–І–µ—А–µ–Ј —В–Њ—З–Ї—Г A³ –њ—А–Њ–≤–Њ–і–Є–Љ –ї–Є–љ–Є—О, –њ–∞—А–∞–ї–ї–µ–ї—М–љ—Г—О –Ї—Г—А—Б—Г —Б—Г–і–љ–∞-
–љ–∞–±–ї—О–і–∞—В–µ–ї—П. –Ю—В–Љ–µ—В–Є–Љ —В–Њ—З–Ї—Г –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П —Н—В–Њ–≥–Њ –Ї—Г—А—Б–∞ —Б –ї–Є–љ–Є–µ–є
–Ґ¹–Т³, –Ї–Њ—В–Њ—А—Г—О –Њ–±–Њ–Ј–љ–∞—З–Є–Љ –±—Г–Ї–≤–Њ–є K"'. –Т–µ–Ї—В–Њ—А –Р–Ъ!" –±—Г–і–µ—В —В–Њ–є
—Б–Ї–Њ—А–Њ—Б—В—М—О, —Б –Ї–Њ—В–Њ—А–Њ–є –і–Њ–ї–ґ–љ–Њ –Є–і—В–Є —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М, —З—В–Њ–±—Л
—А–∞–Ј–Њ–є—В–Є—Б—М —Б —Б—Г–і–љ–Њ–Љ –Т –≤ –Ј–∞–і–∞–љ–љ–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є r, –љ–µ –Љ–µ–љ—П—П –Ї—Г—А—Б–∞.
–Т–µ–Ї—В–Њ—А –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–є —Б–Ї–Њ—А–Њ—Б—В–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –±—Г–і–µ—В K'B³.
–†–µ—И–Є–Љ –Ј–∞–і–∞—З—Г, –њ—А–µ–і–њ–Њ–ї–∞–≥–∞—П –Є–Ј–Љ–µ–љ–Є—В—М –Є –Ї—Г—А—Б, –Є —Б–Ї–Њ—А–Њ—Б—В—М
—Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П.
–Т—Б–µ –Ї—Г—А—Б—Л –Љ–µ–ґ–і—Г —В–Њ—З–Ї–∞–Љ–Є –Ъ' –Є –Ъ" –∞ —В–∞–Ї–ґ–µ –Љ–µ–ґ–і—Г —В–Њ—З–Ї–∞–Љ–Є
–Ъ" –Є –Ъ'" –±—Г–і—Г—В —В—А–µ–±–Њ–≤–∞—В—М –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є,
—В. –µ. –±—Г–і—Г—В —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Њ–≤–∞—В—М –њ–Њ—Б—В–∞–≤–ї–µ–љ–љ–Њ–є –Ј–∞–і–∞—З–µ –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—П
—Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П —Б –Є–Ј–Љ–µ–љ–µ–љ–Є–µ–Љ –Ї—Г—А—Б–∞ –Є —Б–Ї–Њ—А–Њ—Б—В–Є.
–Я–Њ—Б–ї–µ –њ–Њ–≤–Њ—А–Њ—В–∞ –Є–ї–Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П —Б–Ї–Њ—А–Њ—Б—В–Є –Є–ї–Є —В–Њ–≥–Њ –Є –і—А—Г–≥–Њ–≥–Њ
–≤–Љ–µ—Б—В–µ —Б—Г–і–љ–Њ-–љ–∞–±–ї—О–і–∞—В–µ–ї—М –і–Њ–ї–ґ–љ–Њ —Б—А–∞–Ј—Г –ґ–µ –љ–∞—З–∞—В—М –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ—Г—О –њ—А–Њ–Ї–ї–∞–і–Ї—Г, —З—В–Њ–±—Л –њ—А–Њ–≤–µ—А–Є—В—М: –∞) —Б–≤–Њ–Є —А–∞—Б—З–µ—В—Л –Є –±) –љ–µ –Є–Ј–Љ–µ–љ–Є–ї–Њ –ї–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ —Е–∞—А–∞–Ї—В–µ—А —Б–≤–Њ–µ–≥–Њ –і–≤–Є–ґ–µ–љ–Є—П.
–Ъ—А–Њ–Љ–µ —Н—В–Є—Е –Љ–µ—В–Њ–і–Њ–≤ —А–µ—И–µ–љ–Є—П –њ–Њ—Б—В–∞–≤–ї–µ–љ–љ—Л—Е –Ј–∞–і–∞—З, –Љ–Њ–ґ–љ–Њ
–≤–Њ—Б–њ–Њ–ї—М–Ј–Њ–≤–∞—В—М—Б—П —Д–Њ—А–Љ—Г–ї–∞–Љ–Є –∞–љ–∞–ї–Є—В–Є—З–µ—Б–Ї–Њ–є –≥–µ–Њ–Љ–µ—В—А–Є–Є, –Є—Б–њ–Њ–ї—М–Ј—Г—П
—Б–Є—Б—В–µ–Љ—Г –њ–Њ–ї—П—А–љ—Л—Е –Ї–Њ–Њ—А–і–Є–љ–∞—В.
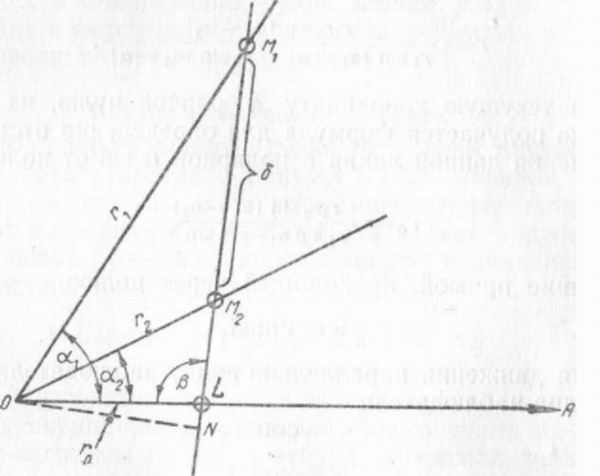
–Я—А–µ–і–њ–Њ–ї–Њ–ґ–Є–Љ, —З—В–Њ –њ–∞ —А–Є—Б. 136 —В–Њ—З–Ї–∞ –Ю вАФ–њ–Њ–ї—О—Б, –ї–Є–љ–Є—П –Р–Ю вАФ
–њ–Њ–ї—П—А–љ–∞—П –Њ—Б—М, r¹вАФ –њ–Њ–ї—П—А–љ—Л–є —А–∞–і–Є—Г—Б –Є –∞¹ вАФ –њ–Њ–ї—П—А–љ—Л–є —Г–≥–Њ–ї.
–†–∞—Б—Б—В–Њ—П–љ–Є–µ –Љ–µ–ґ–і—Г —В–Њ—З–Ї–∞–Љ–Є –Ь¹ –Є –Ь² = 8 –Љ–Њ–ґ–µ—В –±—Л—В—М –≤—Л—З–Є—Б–ї–µ–љ–Њ –њ–Њ —Д–Њ—А–Љ—Г–ї–µ
–£—А–∞–≤–љ–µ–љ–Є–µ –њ—А—П–Љ–Њ–є, –њ—А–Њ—Е–Њ–і—П—Й–µ–є —З–µ—А–µ–Ј —В–Њ—З–Ї–Є –Ь¹ –Є –Ь², –±—Г–і–µ—В
–Я—А–Є–љ—П–≤ —В–µ–Ї—Г—Й—Г—О –Ї–Њ–Њ—А–і–Є–љ–∞—В—Г –∞ —А–∞–≤–љ–Њ–є –љ—Г–ї—О, –Є–Ј —Д–Њ—А–Љ—Г–ї—Л
(119) –ї–µ–≥–Ї–Њ –њ–Њ–ї—Г—З–∞–µ—В—Б—П —Д–Њ—А–Љ—Г–ї–∞ –і–ї—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Њ—В—Б—В–Њ—П–љ–Є—П —В–Њ—З–Ї–Є –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П –і–∞–љ–љ–Њ–є –ї–Є–љ–Є–Є —Б –њ–Њ–ї—П—А–љ–Њ–є –Њ—Б—М—О –Њ—В –њ–Њ–ї—О—Б–∞ –Ю
–£—А–∞–≤–љ–µ–љ–Є–µ –њ—А—П–Љ–Њ–є, –њ—А–Њ—Е–Њ–і—П—Й–µ–є —З–µ—А–µ–Ј –њ–Њ–ї—О—Б,
–£—Б–ї–Њ–≤–Є—П –і–≤–Є–ґ–µ–љ–Є—П –њ–∞—А–∞–ї–ї–µ–ї—М–љ–Њ —Б—Г–і–љ—Г-–љ–∞–±–ї—О–і–∞—В–µ–ї—О –Є —Б–Њ —Б–Ї–Њ—А–Њ—Б—В—М—О —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П
–£–≥–Њ–ї –Љ–µ–ґ–і—Г –і–∞–љ–љ–Њ–є –њ—А—П–Љ–Њ–є –Є –њ–Њ–ї—П—А–љ–Њ–є –Њ—Б—М—О, –Њ–±–Њ–Ј–љ–∞—З–µ–љ–љ—Л–є
–±—Г–Ї–≤–Њ–є –≤, –Љ–Њ–ґ–µ—В –±—Л—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ –Є–Ј —В—А–µ—Г–≥–Њ–ї—М–љ–Є–Ї–∞ O–Ь¹L –њ–Њ –і–≤—Г–Љ
—Б—В–Њ—А–Њ–љ–∞–Љ –Є —Г–≥–ї—Г –Љ–µ–ґ–і—Г –љ–Є–Љ–Є.
–Ъ–Њ–≥–і–∞ —Г–≥–Њ–ї –≤ –Њ–њ—А–µ–і–µ–ї–µ–љ, –ї–µ–≥–Ї–Њ –Њ–њ—А–µ–і–µ–ї—П–µ—В—Б—П –Є –і–ї–Є–љ–∞ –њ–µ—А–њ–µ–љ–і–Є–Ї—Г–ї—П—А–∞ –Є–Ј –њ–Њ–ї—О—Б–∞ –љ–∞ –і–∞–љ–љ—Г—О –њ—А—П–Љ—Г—О (–ї–Є–љ–Є—П ON).
–Э–µ–Ї–Њ—В–Њ—А—Л–µ —Б–≤–Њ–є—Б—В–≤–∞ —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–≤,
–≤–ї–Є—П—О—Й–Є–µ –љ–∞ –µ–≥–Њ –њ—А–Є–Љ–µ–љ–µ–љ–Є–µ –і–ї—П —Ж–µ–ї–µ–є –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П
—Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ
–Ф–∞–ї—М–љ–Њ—Б—В—М –і–µ–є—Б—В–≤–Є—П
–Є –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –њ–ї–∞–≤—Г—З–Є—Е —Б—А–µ–і—Б—В–≤
–†–∞–і–Є—Г—Б –і–µ–є—Б—В–≤–Є—П —Б–Њ–≤—А–µ–Љ–µ–љ–љ—Л—Е —Б—Г–і–Њ–≤—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ—Л—Е
—Б—В–∞–љ—Ж–Є–є –Њ–±—Л—З–љ–Њ –Њ—Е–≤–∞—В—Л–≤–∞–µ—В –Ј–Њ–љ—Г 30вАФ50 –Љ–Є–ї—М.
–Ь–µ—А—В–≤–∞—П –Ј–Њ–љ–∞ 30вАФ120 –Љ.
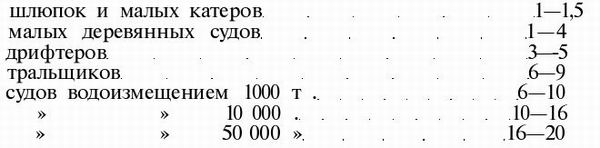
–Э–Њ—А–Љ–∞–ї—М–љ–∞—П –і–∞–ї—М–љ–Њ—Б—В—М –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –њ–ї–∞–≤—Г—З–Є—Е —Б—А–µ–і—Б—В–≤
(–≤ –Љ–Є–ї—П—Е):
–Я—А–Є –≤–Њ–ї–љ–µ–љ–Є–Є 4 –±–∞–ї–ї–∞ –Љ–µ–ї–Ї–Є–µ —А—Л–±–Њ–ї–Њ–≤–љ—Л–µ —Б—Г–і–∞ —А–∞–Ј–ї–Є—З–∞—О—В—Б—П
—Б —В—А—Г–і–Њ–Љ; –њ—А–Є –≤–Њ–ї–љ–µ–љ–Є–Є 6 –±–∞–ї–ї–Њ–≤ –Є—Б—З–µ–Ј–∞—О—В —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –Љ–Њ—А—Б–Ї–Є—Е
—В—А–∞–ї—М—Й–Є–Ї–Њ–≤ –Є —Б—Г–і–Њ–≤ –њ—А–Є–±—А–µ–ґ–љ–Њ–≥–Њ –њ–ї–∞–≤–∞–љ–Є—П —Б—А–µ–і–љ–Є—Е —А–∞–Ј–Љ–µ—А–Њ–≤;
–Ї–Њ–≥–і–∞ –≤–Њ–ї–љ–µ–љ–Є–µ 8 –±–∞–ї–ї–Њ–≤ –љ–∞ –≤—Б–µ–Љ –і–Є–∞–њ–∞–Ј–Њ–љ–µ —А–∞—Б—Б—В–Њ—П–љ–Є—П –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—О—В—Б—П —В–Њ–ї—М–Ї–Њ –Ї—А—Г–њ–љ—Л–µ –Њ–Ї–µ–∞–љ—Б–Ї–Є–µ —Б—Г–і–∞ —Б —А–∞–Ј–≤–Є—В—Л–Љ–Є –љ–∞–і—Б—В—А–Њ–є–Ї–∞–Љ–Є.
–Э–∞ –і–∞–ї—М–љ–Њ—Б—В—М –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ –≤–ї–Є—П—О—В —А–∞–Ї—Г—А—Б —Б—Г–і–љ–∞ (–њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—Г–і–љ–∞ –≤ –њ–µ—А—Б–њ–µ–Ї—В–Є–≤–µ), –µ–≥–Њ –Њ—Б–∞–і–Ї–∞ –Є —Г—Б–ї–Њ–≤–Є—П —А–∞—Б–њ—А–Њ—Б—В—А–∞–љ–µ–љ–Є—П —А–∞–і–Є–Њ–≤–Њ–ї–љ –≤–Њ –≤—А–µ–Љ—П –љ–∞–±–ї—О–і–µ–љ–Є—П.
–†–∞–Ї—Г—А—Б –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞
–≠—Е–Њ-—Б–Є–≥–љ–∞–ї –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–Є –≤ –Ї–Њ–µ–Љ —Б–ї—Г—З–∞–µ –љ–µ –і–∞–µ—В
–њ—А–∞–≤–Є–ї—М–љ–Њ–≥–Њ –њ—А–µ–і—Б—В–∞–≤–ї–µ–љ–Є—П –Њ —А–∞–Ї—Г—А—Б–µ (–њ–µ—А—Б–њ–µ–Ї—В–Є–≤–љ–Њ–Љ –њ–Њ–ї–Њ–ґ–µ–љ–Є–Є) –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, —Е–Њ—В—П —В–∞–Ї–Њ–µ –≤–њ–µ—З–∞—В–ї–µ–љ–Є–µ –Є–љ–Њ–≥–і–∞ –Є —Б–Њ–Ј–і–∞–µ—В—Б—П –њ—А–Є –љ–∞–±–ї—О–і–µ–љ–Є–Є —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–Њ–≤ –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞.
–Ф–ї—П —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–Є—П —А–∞–Ї—Г—А—Б–∞ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ
–њ—А–Њ–Є–Ј–≤–µ—Б—В–Є –Є—Б—В–Є–љ–љ—Г—О –њ—А–Њ–Ї–ї–∞–і–Ї—Г.
–Я–Њ–Љ–µ—Е–Є –Њ—В –і—А—Г–≥–Є—Е —Б—Г–і–Њ–≤
–Х—Б–ї–Є —Н—Е–Њ-—Б–Є–≥–љ–∞–ї –љ–∞—Б—В–Њ–ї—М–Ї–Њ —Б–Є–ї–µ–љ, —З—В–Њ –Љ–Њ–ґ–µ—В –Њ—В—А–∞–Ј–Є—В—М—Б—П –Њ—В
—Б—Г–і–љ–∞, –њ–Њ—Б–ї–∞–≤—И–µ–≥–Њ —Н—В–Њ—В —Б–Є–≥–љ–∞–ї, –Є —Б–љ–Њ–≤–∞ –Њ—В—А–∞–Ј–Є—В—М—Б—П –Њ—В –≤—В–Њ—А–Њ–≥–Њ
—Б—Г–і–љ–∞, —В–Њ –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –њ–µ—А–≤–Њ–≥–Њ —Б—Г–і–љ–∞ –Ј–∞ –і–µ–є—Б—В–≤–Є—В–µ–ї—М–љ—Л–Љ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–Њ–Љ –њ–Њ—П–≤–Є—В—Б—П –≤—В–Њ—А–Њ–є —Н—Е–Њ-—Б–Є–≥–љ–∞–ї, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л–є –Њ—В —Ж–µ–љ—В—А–∞ —Н–Ї—А–∞–љ–∞ –≤ –і–≤–∞ —А–∞–Ј–∞ –і–∞–ї—М—И–µ, —З–µ–Љ –њ–µ—А–≤—Л–є —Б–Є–≥–љ–∞–ї.
–Х—Б–ї–Є —В–∞–Ї–Є—Е –Њ—В—А–∞–ґ–µ–љ–Є–є –Љ–µ–ґ–і—Г —Б—Г–і–∞–Љ–Є –±—Г–і–µ—В –љ–µ—Б–Ї–Њ–ї—М–Ї–Њ, —В–Њ –љ–∞
—Н–Ї—А–∞–љ–µ –≤–Њ–Ј–љ–Є–Ї–∞–µ—В —Б–µ—А–Є—П —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–Њ–≤, —А–∞—Б–њ–Њ–ї–Њ–ґ–µ–љ–љ—Л—Е –љ–∞ –њ–µ–ї–µ–љ–≥–µ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–∞ –Њ–і–Є–љ–∞–Ї–Њ–≤—Л—Е —А–∞—Б—Б—В–Њ—П–љ–Є—П—Е –і—А—Г–≥ –Њ—В –і—А—Г–≥–∞. –Ф–µ–є—Б—В–≤–Є—В–µ–ї—М–љ—Л–Љ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–Њ–Љ –±—Г–і–µ—В —Б–∞–Љ—Л–є –±–ї–Є–ґ–љ–Є–є –Ї —Ж–µ–љ—В—А—Г —Н–Ї—А–∞–љ–∞.
–≠—В–Њ —П–≤–ї–µ–љ–Є–µ –Є–Љ–µ–µ—В –Љ–µ—Б—В–Њ –≤ —В–Њ–Љ —Б–ї—Г—З–∞–µ, –Ї–Њ–≥–і–∞ –Њ–±–∞ —Б—Г–і–љ–∞ –љ–∞—Е–Њ–і—П—В—Б—П –љ–∞ —В—А–∞–≤–µ—А–Ј–µ –і—А—Г–≥ —Г –і—А—Г–≥–∞, —В–∞–Ї –Ї–∞–Ї –≤ —Н—В–Њ—В –Љ–Њ–Љ–µ–љ—В –Њ—В—А–∞–ґ–∞—О—Й–Є–µ –њ–Њ–≤–µ—А—Е–љ–Њ—Б—В–Є –Њ–±–Њ–Є—Е —Б—Г–і–Њ–≤ –±—Г–і—Г—В –љ–∞–Є–±–Њ–ї—М—И–Є–Љ–Є.
–Ю–±—Й–Є–µ —Б–Њ–Њ–±—А–∞–ґ–µ–љ–Є—П –њ–Њ –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є—О —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —Б—В–∞–љ—Ж–Є–Є
–њ—А–Є —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є–Є —Б—Г–і–Њ–≤
1. –Э–µ–і–Њ–Њ—Ж–µ–љ–Ї–∞ –Є –њ–µ—А–µ–Њ—Ж–µ–љ–Ї–∞ —А–Њ–ї–Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Њ–і–Є–љ–∞–Ї–Њ–≤–Њ
–Њ–њ–∞—Б–љ—Л –њ—А–Є —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є–Є —Б–Њ –≤—Б—В—А–µ—З–љ—Л–Љ–Є —Б—Г–і–∞–Љ–Є –≤ —Г—Б–ї–Њ–≤–Є—П—Е –њ–ї–Њ—Е–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є.
2. –°—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—М, –љ–µ –Є—Б–њ–Њ–ї—М–Ј—Г—О—Й–Є–є –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Ї–∞–Ї —А–∞–і–Є–Њ–і–∞–ї—М–љ–Њ–Љ–µ—А–∞ –Є —Г–≥–ї–Њ–Љ–µ—А–∞ –Є –Њ–≥—А–∞–љ–Є—З–Є–≤–∞—О—Й–Є–є—Б—П
—В–Њ–ї—М–Ї–Њ –њ—А–Њ—Б–Љ–Њ—В—А–Њ–Љ –Њ–±—Б—В–∞–љ–Њ–≤–Ї–Є –љ–∞ —Н–Ї—А–∞–љ–µ, –і–Њ–њ—Г—Б–Ї–∞–µ—В –≥—А—Г–±—Г—О
–Њ—И–Є–±–Ї—Г
3. –°—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—М, —Б—З–Є—В–∞—О—Й–Є–є, —З—В–Њ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А —Б–њ–Њ—Б–Њ–±–µ–љ –Њ–±–љ–∞—А—Г–ґ–Є—В—М –∞–±—Б–Њ–ї—О—В–љ–Њ –≤—Б–µ –Њ–±—К–µ–Ї—В—Л –≤ –Њ–Ї—А—Г–ґ–µ–љ–Є–Є —Б—Г–і–љ–∞ –њ—А–Є –ї—О–±—Л—Е
–≥–Є–і—А–Њ–Љ–µ—В–µ–Њ—А–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е, –і–Њ–њ—Г—Б–Ї–∞–µ—В –Њ–њ–∞—Б–љ—Г—О –њ–µ—А–µ–Њ—Ж–µ–љ–Ї—Г –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В–µ–є –њ—А–Є–±–Њ—А–∞.
4. –Я—А–Є –њ–ї–∞–≤–∞–љ–Є–Є –≤ —Г—Б–ї–Њ–≤–Є—П—Е –њ–ї–Њ—Е–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є —Б—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—М
–Є–Љ–µ–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –і–Њ—Б—В–∞—В–Њ—З–љ–Њ —В–Њ—З–љ–Њ –Њ–њ—А–µ–і–µ–ї–Є—В—М —А–∞—Б—Б—В–Њ—П–љ–Є–µ –і–Њ
–Њ–±–љ–∞—А—Г–ґ–µ–љ–љ—Л—Е –љ–∞ —Н–Ї—А–∞–љ–µ —Б—Г–і–Њ–≤ –Є –Є—Е –њ–µ–ї–µ–љ–≥–Є. –°–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ, –Њ–љ
–Є–Љ–µ–µ—В –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л–µ –і–∞–љ–љ—Л–µ –і–ї—П —Б–≤–Њ–µ–≤—А–µ–Љ–µ–љ–љ–Њ–≥–Њ –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є—П
–≤–Њ –Є–Ј–±–µ–ґ–∞–љ–Є–µ –Њ–њ–∞—Б–љ–Њ–≥–Њ —Б–±–ї–Є–ґ–µ–љ–Є—П.
–Я—А–Є—З–Є–љ—Л —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤, –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–љ—Л—Е —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ
1. –Ю—В—Б—Г—В—Б—В–≤–Є–µ –њ—А–µ–і–≤–∞—А–Є—В–µ–ї—М–љ–Њ–≥–Њ –Љ–µ—В–Њ–і–Є—З–µ—Б–Ї–Њ–≥–Њ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–≥–Њ –љ–∞–±–ї—О–і–µ–љ–Є—П.
2. –Ю—В—Б—Г—В—Б—В–≤–Є–µ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Є–ї–Є –љ–µ–њ—А–∞–≤–Є–ї—М–љ—Л–µ –љ–∞–±–ї—О–і–µ–љ–Є—П
—Н–ї–µ–Љ–µ–љ—В–Њ–≤ –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–Њ–≤ –њ–Њ –Є—Е —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞–Љ.
3. –Э–µ–њ—А–∞–≤–Є–ї—М–љ–Њ–µ —А–µ–≥—Г–ї–Є—А–Њ–≤–∞–љ–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Є–ї–Є –µ–≥–Њ –љ–µ–њ–Њ–ї–љ–Њ—Ж–µ–љ–љ–Њ–µ –і–µ–є—Б—В–≤–Є–µ, —П–≤–ї—П—О—Й–Є–µ—Б—П –њ—А–Є—З–Є–љ–Њ–є —В–Њ–≥–Њ, —З—В–Њ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л —Б—Г–і–Њ–≤ –љ–µ –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—О—В—Б—П –Є–ї–Є –Њ–±–љ–∞—А—Г–ґ–Є–≤–∞—О—В—Б—П –њ–Њ–Ј–і–љ–Њ (–љ–∞
–Љ–∞–ї–Њ–Љ —А–∞—Б—Б—В–Њ—П–љ–Є–Є).
4. –І—А–µ–Ј–Љ–µ—А–љ–∞—П —Б–Ї–Њ—А–Њ—Б—В—М –њ–ї–∞–≤–∞–љ–Є—П –≤ –њ–ї–Њ—Е—Г—О –≤–Є–і–Є–Љ–Њ—Б—В—М, –Ї–Њ—В–Њ—А–∞—П –і–Њ–њ—Г—Б–Ї–∞–µ—В—Б—П –њ—А–Є –њ–µ—А–µ–Њ—Ж–µ–љ–Ї–µ —А–Њ–ї–Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞.
5. –°–ї–Є—И–Ї–Њ–Љ –њ–Њ–Ј–і–љ–Њ –њ—А–µ–і–њ—А–Є–љ—П—В—Л–є –Љ–∞–љ–µ–≤—А –і–ї—П —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П
—Б–Њ –≤—Б—В—А–µ—З–љ—Л–Љ —Б—Г–і–љ–Њ–Љ.
6. –Э–µ–Њ–±–Њ—Б–љ–Њ–≤–∞–љ–љ–Њ–µ –Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є–µ –Є –њ–Њ–і–∞—З–∞ —Н–≤–Њ–ї—О—Ж–Є–Њ–љ–љ—Л—Е
—Б–Є–≥–љ–∞–ї–Њ–≤ –≤–љ–µ –≤–Є–Ј—Г–∞–ї—М–љ–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В–Є,
7. –Э–∞—А—Г—И–µ–љ–Є–µ —В—А–µ–±–Њ–≤–∞–љ–Є—П –Я—А–∞–≤–Є–ї –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ –≤ —З–∞—Б—В–Є —Г—Б—В–∞–љ–Њ–≤–ї–µ–љ–љ—Л—Е —В—Г–Љ–∞–љ–љ—Л—Е —Б–Є–≥–љ–∞–ї–Њ–≤.
8. –Ю—В–Њ–ґ–і–µ—Б—В–≤–ї–µ–љ–Є–µ –љ–∞–±–ї—О–і–µ–љ–Є–є –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ —Б
–≤–Є–Ј—Г–∞–ї—М–љ–Њ–є –≤–Є–і–Є–Љ–Њ—Б—В—М—О.
9. –Ш–Ј–ї–Є—И–љ–µ–µ –і–Њ–≤–µ—А–Є–µ –Ї —А–∞–±–Њ—В–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞, –љ–µ —Г—З–Є—В—Л–≤–∞—О—Й–µ–µ, —З—В–Њ —В–µ—Е–љ–Є—З–µ—Б–Ї–Є–µ –љ–µ—Б–Њ–≤–µ—А—И–µ–љ—Б—В–≤–∞ —Б—В–∞–љ—Ж–Є–Є, –љ–µ–њ—А–∞–≤–Є–ї—М–љ–∞—П
—Н–Ї—Б–њ–ї—Г–∞—В–∞—Ж–Є—П –µ–µ, –≤–ї–Є—П–љ–Є–µ –≥–Є–і—А–Њ–Љ–µ—В–µ–Њ—А–Њ–ї–Њ–≥–Є—З–µ—Б–Ї–Є—Е —Д–∞–Ї—В–Њ—А–Њ–≤
(–∞—В–Љ–Њ—Б—Д–µ—А–љ—Л–µ –Њ—Б–∞–і–Ї–Є, –Ј—Л–±—М –Є –і—А.), —Б–ї–∞–±–∞—П –Њ—В—А–∞–ґ–∞—В–µ–ї—М–љ–∞—П —Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В—М –љ–µ–±–Њ–ї—М—И–Є—Е, –Њ—Б–Њ–±–µ–љ–љ–Њ –і–µ—А–µ–≤—П–љ–љ—Л—Е —Б—Г–і–Њ–≤,вАФ –Љ–Њ–≥—Г—В –і–∞—В—М
—Б–ї–Є—И–Ї–Њ–Љ —Б–ї–∞–±—Л–µ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –Є–ї–Є —Б–Њ–≤—Б–µ–Љ –љ–µ –і–∞—В—М –Є—Е.
10. –Ю—В—Б—Г—В—Б—В–≤–Є–µ —Г—З–µ—В–∞ —В–Њ–≥–Њ, —З—В–Њ —Б—Г–і–љ–Њ, –љ–µ –Є–Љ–µ—О—Й–µ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞, –±—Г–і–µ—В –і–µ–є—Б—В–≤–Њ–≤–∞—В—М –≤ —Б–Њ–Њ—В–≤–µ—В—Б—В–≤–Є–Є —Б –Я—А–∞–≤–Є–ї–∞–Љ–Є –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ, –Њ–ґ–Є–і–∞—П —В–Њ–≥–Њ –ґ–µ –Њ—В
–≤—Б–µ—Е —Б—Г–і–Њ–≤.
–Ф–µ–є—Б—В–≤–Є—П —Б—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—П –њ—А–Є —Б–љ–Є–ґ–µ–љ–Є–Є –≤–Є–і–Є–Љ–Њ—Б—В–Є
1. –Я—А–Є —Г–Љ–µ–љ—М—И–µ–љ–Є–Є –і–∞–ї—М–љ–Њ—Б—В–Є –≤–Є–і–Є–Љ–Њ—Б—В–Є –≤—Б–ї–µ–і—Б—В–≤–Є–µ —В—Г–Љ–∞–љ–∞,
–Љ–≥–ї—Л, —Б–љ–µ–≥–Њ–њ–∞–і–∞ –Є–ї–Є —Б–Є–ї—М–љ–Њ–≥–Њ –ї–Є–≤–љ—П –Є —В. –і. –≤–∞—Е—В–µ–љ–љ—Л–є —И—В—Г—А–Љ–∞–љ
–Њ–±—П–Ј–∞–љ –њ—А–µ–і—Г–њ—А–µ–і–Є—В—М –Ї–∞–њ–Є—В–∞–љ–∞, –≤–Ї–ї—О—З–Є—В—М —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –Є –љ–∞—З–∞—В—М
–љ–∞–±–ї—О–і–µ–љ–Є–µ –њ–Њ —И–Ї–∞–ї–µ –і–∞–ї—М–љ–Њ—Б—В–Є, –њ—А–µ–≤—Л—И–∞—О—Й–µ–є –љ–∞–±–ї—О–і–∞–µ–Љ—Г—О
–і–∞–ї—М–љ–Њ—Б—В—М –≤–Є–і–Є–Љ–Њ—Б—В–Є.
2. –Я—А–Є –≤–љ–µ–Ј–∞–њ–љ–Њ–Љ —Г—Е—Г–і—И–µ–љ–Є–Є –≤–Є–і–Є–Љ–Њ—Б—В–Є –љ–∞–і–ї–µ–ґ–Є—В –љ–µ–Љ–µ–і–ї–µ–љ–љ–Њ —Г–Љ–µ–љ—М—И–Є—В—М —Б–Ї–Њ—А–Њ—Б—В—М –і–≤–Є–ґ–µ–љ–Є—П, –≤–Ї–ї—О—З–Є—В—М —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –Є –љ–∞—З–∞—В—М –љ–∞–±–ї—О–і–µ–љ–Є–µ –љ–∞ 5-–Љ–Є–ї—М–љ–Њ–є —И–Ї–∞–ї–µ, —З—В–Њ–±—Л —Г–±–µ–і–Є—В—М—Б—П –≤ –Њ—В—Б—Г—В—Б—В–≤–Є–Є –±–ї–Є–Ј–Ї–Њ–є –Њ–њ–∞—Б–љ–Њ—Б—В–Є. –Ч–∞—В–µ–Љ –њ–µ—А–µ–Ї–ї—О—З–Є—В—М –љ–∞ 15-–Љ–Є–ї—М–љ—Г—О
—И–Ї–∞–ї—Г. –Т –і–∞–ї—М–љ–µ–є—И–µ–Љ –љ–∞–±–ї—О–і–µ–љ–Є—П –≤–µ–і—Г—В—Б—П –њ–Њ–њ–µ—А–µ–Љ–µ–љ–љ–Њ –љ–∞ –Ї–∞–ґ–і–Њ–є –Є–Ј —Н—В–Є—Е —И–Ї–∞–ї. –Ф–ї—П –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є—П –Љ–µ–ї–Ї–Є—Е —Б—Г–і–Њ–≤ –љ–∞ –±–ї–Є–Ј–Ї–Њ–Љ
—А–∞—Б—Б—В–Њ—П–љ–Є–Є –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Є –њ—А–Њ–Є–Ј–≤–Њ–і–Є—В—М –њ—А–Њ—Б–Љ–Њ—В—А –љ–∞
1,5-–Љ–Є–ї—М–љ–Њ–є —И–Ї–∞–ї–µ –і–∞–ї—М–љ–Њ—Б—В–Є. –Т –љ–∞—Б—В–Њ—П—Й–µ–µ –≤—А–µ–Љ—П –і–ї—П –љ–∞–±–ї—О–і–µ–љ–Є—П –≤ –Њ—В–Ї—А—Л—В–Њ–Љ –Љ–Њ—А–µ —Б–ї–µ–і—Г–µ—В —Б—З–Є—В–∞—В—М –ї—Г—З—И–µ–є 15-–Љ–Є–ї—М–љ—Г—О
—И–Ї–∞–ї—Г –і–∞–ї—М–љ–Њ—Б—В–Є.
3. –Я—А–Є –Њ–±–љ–∞—А—Г–ґ–µ–љ–Є–Є –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞
–і—А—Г–≥–Њ–≥–Њ —Б—Г–і–љ–∞ –љ–∞–±–ї—О–і–µ–љ–Є–µ –Ј–∞ –љ–Є–Љ –љ—Г–ґ–љ–Њ –≤–µ—Б—В–Є –і–Њ –њ–Њ–ї–љ–Њ–≥–Њ —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б—Г–і–Њ–≤.
4. –Ь–µ—Б—В–∞ –≤—Б–µ—Е –Њ–±–љ–∞—А—Г–ґ–µ–љ–љ—Л—Е –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ —Б—Г–і–Њ–≤
—Б–ї–µ–і—Г–µ—В –љ–µ–Љ–µ–і–ї–µ–љ–љ–Њ –љ–∞–љ–µ—Б—В–Є –љ–∞ –њ–ї–∞–љ—И–µ—В, –Ї–∞—А—В—Г –Є–ї–Є –ї–Є—Б—В –±—Г–Љ–∞–≥–Є
—Б —Г–Ї–∞–Ј–∞–љ–Є–µ–Љ –≤—А–µ–Љ–µ–љ–Є –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—П –Є –Њ—В—Б—З–µ—В–Њ–Љ —Б—Г–і–Њ–≤–Њ–≥–Њ –ї–∞–≥–∞ –≤
—Н—В–Њ—В –Љ–Њ–Љ–µ–љ—В. –Я—А–Є —Н—В–Њ–Љ –љ—Г–ґ–љ–Њ —Б–і–µ–ї–∞—В—М —Б–Њ–Њ—В–≤–µ—В—Б—В–≤—Г—О—Й—Г—О –Ј–∞–њ–Є—Б—М –≤
—З–µ—А–љ–Њ–≤–Њ–Љ –≤–∞—Е—В–µ–љ–љ–Њ–Љ –ґ—Г—А–љ–∞–ї–µ.
5. –Ь–Њ–Љ–µ–љ—В—Л –≤–Ї–ї—О—З–µ–љ–Є—П –Є –≤—Л–Ї–ї—О—З–µ–љ–Є—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –Ј–∞–њ–Є—Б–∞—В—М –≤ —З–µ—А–љ–Њ–≤–Њ–Љ –≤–∞—Е—В–µ–љ–љ–Њ–Љ –ґ—Г—А–љ–∞–ї–µ.
6. –Э–∞ –і–∞–ї—М–љ–Є—Е –і–Є—Б—В–∞–љ—Ж–Є—П—Е –љ–∞–±–ї—О–і–µ–љ–Є–µ –Ј–∞ —Н–Ї—А–∞–љ–Њ–Љ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Є –њ—А–Њ–Ї–ї–∞–і–Ї—Г –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞ —Б–ї–µ–і—Г–µ—В –≤–µ—Б—В–Є
–Њ–і–љ–Њ–Љ—Г –Є —В–Њ–Љ—Г –ґ–µ –ї–Є—Ж—Г (–Ї–∞–њ–Є—В–∞–љ—Г –Є–ї–Є –≤–∞—Е—В–µ–љ–љ–Њ–Љ—Г —И—В—Г—А–Љ–∞–љ—Г).
–Т —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –≤–µ—А–Њ—П—В–љ–Њ—Б—В—М –Њ—И–Є–±–Ї–Є –≤ –њ—А–Њ–Ї–ї–∞–і–Ї–µ –Є –Њ—Ж–µ–љ–Ї–µ –Њ–±—Б—В–∞–љ–Њ–≤–Ї–Є –±—Г–і–µ—В –Љ–Є–љ–Є–Љ–∞–ї—М–љ–∞—П.
–Э–∞ –±–ї–Є–Ј–Ї–Є—Е –і–Є—Б—В–∞–љ—Ж–Є—П—Е –Ї–∞–њ–Є—В–∞–љ –і–Њ–ї–ґ–µ–љ —Б–Њ—Б—А–µ–і–Њ—В–Њ—З–Є—В—М —Б–≤–Њ–µ
–≤–љ–Є–Љ–∞–љ–Є–µ –љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є–Є —Б—Г–і–љ–Њ–Љ. –Э–∞ –Њ–±—П–Ј–∞–љ–љ–Њ—Б—В–Є –≤–∞—Е—В–µ–љ–љ–Њ–≥–Њ
—Й—В—Г—А–Љ–∞–љ–∞ –ї–µ–ґ–∞—В –≤–µ–і–µ–љ–Є–µ –љ–∞–±–ї—О–і–µ–љ–Є—П –Ј–∞ —Н–Ї—А–∞–љ–Њ–Љ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞,
–њ—А–Њ–Є–Ј–≤–Њ–і—Б—В–≤–Њ –љ–µ–Њ–±—Е–Њ–і–Є–Љ—Л—Е —А–∞—Б—З–µ—В–Њ–≤ –Є –њ–µ—А–µ–і–∞—З–∞ –њ–Њ–ї—Г—З–µ–љ–љ—Л—Е —Б–≤–µ–і–µ–љ–Є–є –Ї–∞–њ–Є—В–∞–љ—Г.
7. –Ъ–Њ–≥–і–∞ –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –љ–∞–±–ї—О–і–∞—О—В—Б—П —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л
–љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е —Б—Г–і–Њ–≤ –Є —Б–Њ–Ј–і–∞–µ—В—Б—П –Њ–±—Б—В–∞–љ–Њ–≤–Ї–∞, —В—А–µ–±—Г—О—Й–∞—П –љ–µ–њ—А–µ—А—Л–≤–љ–Њ–≥–Њ –љ–∞–±–ї—О–і–µ–љ–Є—П –Ј–∞ —Н–Ї—А–∞–љ–Њ–Љ, –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ –њ—А–Є–≤–ї–µ–Ї–∞—В—М –і–Њ–њ–Њ–ї–љ–Є—В–µ–ї—М–љ–Њ–≥–Њ –љ–∞–±–ї—О–і–∞—В–µ–ї—П. –Т —Н—В–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е –Ї–∞–њ–Є—В–∞–љ –Њ—Б—Г—Й–µ—Б—В–≤–ї—П–µ—В
—Г–њ—А–∞–≤–ї–µ–љ–Є–µ —Б—Г–і–љ–Њ–Љ, –∞ –≤–∞—Е—В–µ–љ–љ—Л–є —И—В—Г—А–Љ–∞–љ –≤–µ–і–µ—В –Љ–∞–љ–µ–≤—А–µ–љ–љ—Г—О
–њ—А–Њ–Ї–ї–∞–і–Ї—Г, –Є—Б–њ–Њ–ї—М–Ј—Г—П –і–∞–љ–љ—Л–µ, —Б–Њ–Њ–±—Й–∞–µ–Љ—Л–µ –љ–∞–±–ї—О–і–∞—В–µ–ї–µ–Љ —Г —Н–Ї—А–∞–љ–∞. –Я–µ—А–Є–Њ–і–Є—З–µ—Б–Ї–Є –Є –Ї–∞–њ–Є—В–∞–љ, –Є –≤–∞—Е—В–µ–љ–љ—Л–є —И—В—Г—А–Љ–∞–љ –і–Њ–ї–ґ–љ—Л
–њ—А–Њ—Б–Љ–∞—В—А–Є–≤–∞—В—М —Н–Ї—А–∞–љ –і–ї—П —Г—П—Б–љ–µ–љ–Є—П —Е–∞—А–∞–Ї—В–µ—А–∞ –Є–Ј–Љ–µ–љ–µ–љ–Є—П –Є–Ј–Њ–±—А–∞–ґ–µ–љ–Є–є –Є –Ї–Њ–љ—В—А–Њ–ї–Є—А–Њ–≤–∞–љ–Є—П —А–∞–±–Њ—В—Л –љ–∞–±–ї—О–і–∞—В–µ–ї—П.
–†–µ–Ї–Њ–Љ–µ–љ–і–∞—Ж–Є–Є –њ–Њ —Г–Ї–ї–Њ–љ–µ–љ–Є—О –Њ—В —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П —Б –і—А—Г–≥–Є–Љ —Б—Г–і–љ–Њ–Љ
–≤ –њ–ї–Њ—Е—Г—О –≤–Є–і–Є–Љ–Њ—Б—В—М –њ—А–Є –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–Є —Б—Г–і–Њ–≤–Њ–є
—А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–Њ–є —Г—Б—В–∞–љ–Њ–≤–Ї–Є
1. –Т –њ—А–Є–±—А–µ–ґ–љ—Л—Е —А–∞–є–Њ–љ–∞—Е –Є –љ–∞ –њ–Њ–і—Е–Њ–і–∞—Е –Ї –њ–Њ—А—В–∞–Љ, –њ—А–Њ–ї–Є–≤–∞–Љ
–Є –±—Г—Е—В–∞–Љ —Б—Г—Й–µ—Б—В–≤—Г–µ—В –≤–µ—А–Њ—П—В–љ–Њ—Б—В—М –≤—Б—В—А–µ—З–Є —Б —Б—Г–і–∞–Љ–Є –ї—О–±—Л—Е —А–∞–Ј–Љ–µ—А–Њ–≤, –≤–Ї–ї—О—З–∞—П –Љ–∞–ї—Л–µ –Є –≥—А–µ–±–љ—Л–µ. –Т—Б–µ —Н—В–Є —Б—Г–і–∞ –Љ–Њ–≥—Г—В —Б–ї–µ–і–Њ)–≤–∞—В—М
—А–∞–Ј–љ—Л–Љ–Є –Ї—Г—А—Б–∞–Љ–Є –Ї –њ—Г–љ–Ї—В–∞–Љ –њ–Њ–±–µ—А–µ–ґ—М—П –Є –Њ—В –љ–Є—Е. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ,
–≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –≤–Њ–Ј–Љ–Њ–ґ–љ–∞ —В–∞–Ї–ґ–µ –≤—Б—В—А–µ—З–∞ —Б —Б—Г–і–∞–Љ–Є, –Ј–∞–љ—П—В—Л–Љ–Є —А—Л–±–љ–Њ–є –ї–Њ–≤–ї–µ–є –Є –і—А—Г–≥–Є–Љ–Є —А–∞–±–Њ—В–∞–Љ–Є, –Њ–≥—А–∞–љ–Є—З–Є–≤–∞—О—Й–Є–Љ–Є –Є—Е –Љ–∞–љ–µ–≤—А–µ–љ–љ–Њ—Б—В—М. –Т –њ–Њ–ї–µ –Ј—А–µ–љ–Є—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Љ–Њ–≥—Г—В –Њ–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ –љ–∞–±–ї—О–і–∞—В—М—Б—П —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –Є —Б—Г–і–Њ–≤, –Є –Ј–љ–∞–Ї–Њ–≤ –њ–ї–∞–≤—Г—З–µ–є –Њ–±—Б—В–∞–љ–Њ–≤–Ї–Є. –Т
—В–∞–Ї–Є—Е —Г—Б–ї–Њ–≤–Є—П—Е –Њ—З–µ–љ—М —В—А—Г–і–љ–Њ —А–∞—Б—Е–Њ–і–Є—В—М—Б—П —Б —Б—Г–і–∞–Љ–Є. –Я–Њ—Н—В–Њ–Љ—Г
–µ–і–Є–љ—Б—В–≤–µ–љ–љ—Л–Љ —Б—А–µ–і—Б—В–≤–Њ–Љ –Є–Ј–±–µ–ґ–∞—В—М —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П —П–≤–ї—П—О—В—Б—П —Г–Љ–µ–љ—М—И–µ–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –і–Њ –Љ–Є–љ–Є–Љ—Г–Љ–∞ –Є —Б–≤–Њ–µ–≤—А–µ–Љ–µ–љ–љ–∞—П –Њ—Б—В–∞–љ–Њ–≤–Ї–∞ —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞.
2. –Я–ї–∞–≤–∞–љ–Є–µ –≤ –Њ—В–Ї—А—Л—В–Њ–Љ –Љ–Њ—А–µ –Љ–Њ–ґ–µ—В –±—Л—В—М —А–∞–Ј–і–µ–ї–µ–љ–Њ –љ–∞ –і–≤–∞
–≤–Є–і–∞: –∞) –њ–ї–∞–≤–∞–љ–Є–µ –љ–∞ –њ—Г—В—П—Е, —З–∞—Б—В–Њ –њ–Њ—Б–µ—Й–∞–µ–Љ—Л—Е –і—А—Г–≥–Є–Љ–Є —Б—Г–і–∞–Љ–Є,
–±) –њ–ї–∞–≤–∞–љ–Є–µ –≤ —А–∞–є–Њ–љ–∞—Е, —А–µ–і–Ї–Њ –њ–Њ—Б–µ—Й–∞–µ–Љ—Л—Е —Б—Г–і–∞–Љ–Є.
–Я–ї–∞–≤–∞–љ–Є–µ –≤ —А–∞–є–Њ–љ–∞—Е, —З–∞—Б—В–Њ –њ–Њ—Б–µ—Й–∞–µ–Љ—Л—Е –і—А—Г–≥–Є–Љ–Є —Б—Г–і–∞–Љ–Є, –±—Г–і–µ—В
–Љ–∞–ї–Њ –Њ—В–ї–Є—З–∞—В—М—Б—П –Њ—В –њ–ї–∞–≤–∞–љ–Є—П –≤ –њ—А–Є–±—А–µ–ґ–љ–Њ–є –Ј–Њ–љ–µ. –°–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ, –Љ–µ—В–Њ–і–Њ–Љ –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П –±—Г–і—Г—В —В–∞–Ї–ґ–µ —Г–Љ–µ–љ—М—И–µ–љ–Є–µ —Б–Ї–Њ—А–Њ—Б—В–Є –і–≤–Є–ґ–µ–љ–Є—П –Є —Б–≤–Њ–µ–≤—А–µ–Љ–µ–љ–љ–∞—П –Њ—Б—В–∞–љ–Њ–≤–Ї–∞ —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞.
–Я–ї–∞–≤–∞–љ–Є–µ –≤ —А–∞–є–Њ–љ–∞—Е —Б –љ–µ–Ј–љ–∞—З–Є—В–µ–ї—М–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ —Б—Г–і–Њ–≤, –Њ—Б–Њ–±–µ–љ–љ–Њ —В–∞–Љ, –≥–і–µ –Љ–∞–ї–Њ–≤–µ—А–Њ—П—В–љ–∞ –≤—Б—В—А–µ—З–∞ —Б –љ–µ–±–Њ–ї—М—И–Є–Љ–Є —Б—Г–і–∞–Љ–Є,
–Ї–∞–њ–Є—В–∞–љ —Б—Г–і–љ–∞, –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–љ–Њ–≥–Њ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ, –Є–Љ–µ–µ—В –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М —Г–Ї–ї–Њ–љ–Є—В—М—Б—П –Њ—В –Њ–њ–∞—Б–љ–Њ–≥–Њ —Б–±–ї–Є–ґ–µ–љ–Є—П —Б –і—А—Г–≥–Є–Љ —Б—Г–і–љ–Њ–Љ –љ–µ
—В–Њ–ї—М–Ї–Њ —Г–Љ–µ–љ—М—И–µ–љ–Є–µ–Љ —Б–Ї–Њ—А–Њ—Б—В–Є –Є–ї–Є –Њ—Б—В–∞–љ–Њ–≤–Ї–Њ–є —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞, –љ–Њ¬ї
—В–∞–Ї–ґ–µ –Є –Є–Ј–Љ–µ–љ–µ–љ–Є–µ–Љ –Ї—Г—А—Б–∞.
3. –Ш–Ј–Љ–µ–љ–µ–љ–Є–µ –Ї—Г—А—Б–∞ —Б–≤–Њ–µ–≥–Њ —Б—Г–і–љ–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М —Б–і–µ–ї–∞–љ–Њ —В–Њ–ї—М–Ї–Њ
—В–Њ–≥–і–∞, –Ї–Њ–≥–і–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ—Л –Є—Б—В–Є–љ–љ—Л–µ –Ї—Г—А—Б –Є —Б–Ї–Њ—А–Њ—Б—В—М –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, –∞ —В–∞–Ї–ґ–µ –Њ–±—Б—В–Њ—П—В–µ–ї—М—Б—В–≤–∞ –≤—Б—В—А–µ—З–Є (–Љ–Њ–Љ–µ–љ—В –њ–µ—А–µ—Б–µ—З–µ–љ–Є—П
–Ї—Г—А—Б–Њ–≤ –Є –љ–∞–Є–Љ–µ–љ—М—И–µ–µ —А–∞—Б—Б—В–Њ—П–љ–Є–µ –Љ–µ–ґ–і—Г —Б—Г–і–∞–Љ–Є).
4. –Э–µ–Ј–∞–≤–Є—Б–Є–Љ–Њ –Њ—В —В–Њ–≥–Њ, –Њ–±–Њ—А—Г–і–Њ–≤–∞–љ–Њ –ї–Є —Б—Г–і–љ–Њ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ
–Є–ї–Є –љ–µ—В, –Њ–љ–Њ –і–Њ–ї–ґ–љ–Њ –Њ—Б—В–∞–љ–Њ–≤–Є—В—М—Б—П, —Г—Б–ї—Л—И–∞–≤ —В—Г–Љ–∞–љ–љ—Л–є —Б–Є–≥–љ–∞–ї
–і—А—Г–≥–Њ–≥–Њ —Б—Г–і–љ–∞. –Ш–Љ–µ–љ–љ–Њ –Њ—Б—В–∞–љ–Њ–≤–Є—В—М—Б—П, —В–∞–Ї –Ї–∞–Ї –њ—А–µ–Ї—А–∞—Й–µ–љ–Є–µ –і–≤–Є–ґ–µ–љ–Є—П —Б—Г–і–љ–∞-–љ–∞–±–ї—О–і–∞—В–µ–ї—П –њ—А–µ–≤—А–∞—Й–∞–µ—В –і–≤–Є–ґ–µ–љ–Є–µ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ
—Б—Г–і–љ–∞ –Є–Ј –Њ—В–љ–Њ—Б–Є—В–µ–ї—М–љ–Њ–≥–Њ –≤ –Є—Б—В–Є–љ–љ–Њ–µ, –Њ–±–ї–µ–≥—З–∞—П —В–µ–Љ —Б–∞–Љ—Л–Љ —А–µ—И–µ–љ–Є–µ –≤–Њ–њ—А–Њ—Б–∞ –Њ —Е–∞—А–∞–Ї—В–µ—А–µ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.
5. –Т–µ–і–µ–љ–Є–µ –њ—А–Њ–Ї–ї–∞–і–Ї–Є –і–≤–Є–ґ–µ–љ–Є—П –≤—Б–µ—Е –Њ–±–љ–∞—А—Г–ґ–µ–љ–љ—Л—Е —Б—Г–і–Њ–≤—Л–Љ
—А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ —Б—Г–і–Њ–≤ –Њ–±—П–Ј–∞—В–µ–ї—М–љ–Њ. –Х—Б–ї–Є –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –њ–Њ—П–≤–ї—П—О—В—Б—П —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –љ–µ—Б–Ї–Њ–ї—М–Ї–Є—Е —Б—Г–і–Њ–≤, —В–Њ –≤ –њ–µ—А–≤—Г—О
–Њ—З–µ—А–µ–і—М –і–Њ–ї–ґ–љ–Њ –±—Л—В—М –Њ–њ—А–µ–і–µ–ї–µ–љ–Њ –і–≤–Є–ґ–µ–љ–Є–µ —В–µ—Е —Б—Г–і–Њ–≤, —Н—Е–Њ-—Б–Є–≥–љ–∞–ї
–Ї–Њ—В–Њ—А—Л—Е –±–ї–Є–ґ–µ –Ї —Ж–µ–љ—В—А—Г —Н–Ї—А–∞–љ–∞.
6. –Х—Б–ї–Є –≤–њ–µ—А–µ–і–Є —В—А–∞–≤–µ—А–Ј–∞ –њ–Њ—П–≤–Є–ї–Њ—Б—М –±–Њ–ї—М—И–Њ–µ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ —Н—Е–Њ-
—Б–Є–≥–љ–∞–ї–Њ–≤ –Њ—В –Њ–±—К–µ–Ї—В–Њ–≤ –љ–∞ –≤–Њ–і–µ, —Б–ї–µ–і—Г–µ—В –њ—А–Є–љ—П—В—М –Њ—Б–Њ–±—Л–µ –Љ–µ—А—Л:
–Њ—Б—В–∞–љ–Њ–≤–Є—В—М –і–≤–Є–ґ–µ–љ–Є–µ, –µ—Б–ї–Є —Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –љ–∞—Е–Њ–і—П—В—Б—П –љ–µ –і–∞–ї–µ–µ 2вАФ3
–Љ–Є–ї—М –Њ—В —Ж–µ–љ—В—А–∞ —Н–Ї—А–∞–љ–∞, –Є–ї–Є –Љ–∞–Ї—Б–Є–Љ–∞–ї—М–љ–Њ —Б–љ–Є–Ј–Є—В—М —Б–Ї–Њ—А–Њ—Б—В—М, –µ—Б–ї–Є
—Н—Е–Њ-—Б–Є–≥–љ–∞–ї—Л –љ–∞—Е–Њ–і—П—В—Б—П –≤ –±–Њ–ї—М—И–µ–Љ —Г–і–∞–ї–µ–љ–Є–Є. –Т–Њ–Њ–±—Й–µ –≥–Њ–≤–Њ—А—П, –Є –≤
–њ–Њ—Б–ї–µ–і–љ–µ–Љ —Б–ї—Г—З–∞–µ —В–∞–Ї–ґ–µ —Б–ї–µ–і—Г–µ—В –Њ—Б—В–∞–љ–Њ–≤–Є—В—М—Б—П, —В–∞–Ї –Ї–∞–Ї –Њ—Б—В–∞–љ–Њ–≤–Ї–∞
–Ј–љ–∞—З–Є—В–µ–ї—М–љ–Њ –Њ–±–ї–µ–≥—З–∞–µ—В—Б—П –Њ–њ—А–µ–і–µ–ї–µ–љ–Є–µ–Љ —Н–ї–µ–Љ–µ–љ—В–Њ–≤ –і–≤–Є–ґ–µ–љ–Є—П –љ–∞–±–ї—О–і–∞–µ–Љ—Л—Е —Б—Г–і–Њ–≤. –Я—А–Њ–і–Њ–ї–ґ–∞—В—М –і–≤–Є–ґ–µ–љ–Є–µ —Б–ї–µ–і—Г–µ—В –ї–Є—И—М –њ–Њ—Б–ї–µ –≤—Л—П-
—Б–љ–µ–љ–Є—П –Њ–±—Б—В–∞–љ–Њ–≤–Ї–Є.
7. –Ф–ї—П —Г–Љ–µ–љ—М—И–µ–љ–Є—П –≤–ї–Є—П–љ–Є—П —А—Л—Б–Ї–∞–љ—М—П —Б—Г–і–љ–∞ –љ–∞ –Ї—Г—А—Б–µ –ї—Г—З—И–µ
–±—А–∞—В—М –њ–µ–ї–µ–љ–≥–Є –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, –∞ –љ–µ –Ї—Г—А—Б–Њ–≤—Л–µ —Г–≥–ї—Л, —В–∞–Ї –Ї–∞–Ї
–њ–µ–ї–µ–љ–≥ –±—Г–і–µ—В —Б–≤—П–Ј–∞–љ —Б –Љ–µ—А–Є–і–Є–∞–љ–Њ–Љ, –∞ –љ–µ —Б –і–Є–∞–Љ–µ—В—А–∞–ї—М–љ–Њ–є –њ–ї–Њ—Б–Ї–Њ—Б—В—М—О, –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ –Ї–Њ—В–Њ—А–Њ–є –≤ –њ—А–Њ—Б—В—А–∞–љ—Б—В–≤–µ –Љ–Њ–ґ–µ—В –±—Л—В—М –љ–µ–њ–Њ—Б—В–Њ—П–љ–љ—Л–Љ.
8. –°–ї–µ–і—Г–µ—В –њ–Њ–Љ–љ–Є—В—М, —З—В–Њ –љ–∞–ї–Є—З–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –і–∞–µ—В —Б—Г–і–Њ–≤–Њ–і–Є—В–µ–ї—О –≤–Њ–Ј–Љ–Њ–ґ–љ–Њ—Б—В—М –≤–Є–і–µ—В—М –Њ–±—Б—В–∞–љ–Њ–≤–Ї—Г –Є –Ј–∞—А–∞–љ–µ–µ –њ—А–Є–љ–Є–Љ–∞—В—М –Љ–µ—А—Л, –љ–Њ –љ–µ –і–∞–µ—В –њ—А–∞–≤–∞ –љ–∞—А—Г—И–∞—В—М –Я—А–∞–≤–Є–ї–∞ –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П
—Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ –Є –£—Б—В–∞–≤ —Б–ї—Г–ґ–±—Л –љ–∞ —Б—Г–і–∞—Е –Љ–Њ—А—Б–Ї–Њ–≥–Њ
—Д–ї–Њ—В–∞ –°–°–°–†.
–†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А —Б –Є—Б—В–Є–љ–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ
–Я—А–Є–Љ–µ–љ–µ–љ–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ —Б –Є—Б—В–Є–љ–љ—Л–Љ –і–≤–Є–ґ–µ–љ–Є–µ–Љ –Ј–љ–∞—З–Є—В–µ–ї—М-
–љ–Њ —Г–њ—А–Њ—Й–∞–µ—В –≤—Б—О —А–∞–±–Њ—В—Г –њ–Њ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є—О —Н–ї–µ–Љ–µ–љ—В–Њ–≤ –і–≤–Є–ґ–µ–љ–Є—П
–љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞, —В–∞–Ї –Ї–∞–Ї –≤ —Н—В–Њ–Љ —Б–ї—Г—З–∞–µ –љ–µ—В –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Њ—Б—В–Є
–≤–µ—Б—В–Є –і–≤–µ –њ—А–Њ–Ї–ї–∞–і–Ї–Є, –Є —Б–ї–µ–і–Њ–≤–∞—В–µ–ї—М–љ–Њ, –±—Г–і–µ—В —В–Њ–ї—М–Ї–Њ –Њ–і–љ–∞ –њ—А–Њ–Ї–ї–∞–і–Ї–∞вАФ–Є—Б—В–Є–љ–љ–∞—П. –Ъ—А–Њ–Љ–µ —В–Њ–≥–Њ, –њ—А–Є –њ—А–Є–Љ–µ–љ–µ–љ–Є–Є —Н—В–Њ–≥–Њ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Љ–Њ–ґ–љ–Њ —Б—А–∞–Ј—Г –≤–Є–і–µ—В—М —А–∞–Ї—Г—А—Б –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–≥–Њ —Б—Г–і–љ–∞.
–†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –Є –Я—А–∞–≤–Є–ї–∞ –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П
—Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ
–†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А —Б—Г—Й–µ—Б—В–≤–µ–љ–љ–Њ –Њ–±–ї–µ–≥—З–∞–µ—В —А–∞–Ј—А–µ—И–µ–љ–Є–µ –Ј–∞–і–∞—З–Є –Њ
–Љ–∞–љ–µ–≤—А–Є—А–Њ–≤–∞–љ–Є–Є —Б—Г–і–љ–Њ–Љ –і–ї—П –њ—А–µ–і–Њ—В–≤—А–∞—Й–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є—П. –Т
—Б–ї—Г—З–∞–µ —А–∞—Б—Е–Њ–ґ–і–µ–љ–Є—П —Б –љ–µ—Б–Ї–Њ–ї—М–Ї–Є–Љ–Є —Б—Г–і–∞–Љ–Є –Ј–∞–і–∞—З–∞ –Љ–Њ–ґ–µ—В –±—Л—В—М
–њ—А–∞–≤–Є–ї—М–љ–Њ —А–µ—И–µ–љ–∞ —В–Њ–ї—М–Ї–Њ –њ—А–Є –њ–Њ–Љ–Њ—Й–Є —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞ –Є–ї–Є –Њ–њ—В–Є—З–µ—Б–Ї–Њ–≥–Њ –і–∞–ї—М–љ–Њ–Љ–µ—А–∞. –Т —Б–≤—П–Ј–Є —Б —Н—В–Є–Љ –≤–Њ–Ј–љ–Є–Ї–∞–µ—В –≤–Њ–њ—А–Њ—Б –Њ
–њ–µ—А–µ—Б–Љ–Њ—В—А–µ –Я—А–∞–≤–Є–ї –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤
–≤ –Љ–Њ—А–µ –і–ї—П —В–Њ–≥–Њ, —З—В–Њ–±—Л –Њ—В—А–∞–Ј–Є—В—М –≤ –љ–Є—Е –Є—Б–њ–Њ–ї—М–Ј–Њ–≤–∞–љ–Є–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞.
–Ю–і–љ–∞–Ї–Њ, –њ–Њ—З–µ–Љ—Г –ґ–µ —В–µ–Ї—Б—В –Я—А–∞–≤–Є–ї –і–ї—П –њ—А–µ–і—Г–њ—А–µ–ґ–і–µ–љ–Є—П —Б—В–Њ–ї–Ї–љ–Њ–≤–µ–љ–Є–є —Б—Г–і–Њ–≤ –≤ –Љ–Њ—А–µ, –њ–µ—А–µ—Б–Љ–Њ—В—А–µ–љ–љ—Л–є –≤ 1948 –≥., –љ–µ –Њ—В—А–∞–Ј–Є–ї –≤
—Б–µ–±–µ –њ–Њ–ї–Њ–ґ–Є—В–µ–ї—М–љ—Л—Е —Б–≤–Њ–є—Б—В–≤ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞, —Е–Њ—В—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—Ж–Є–Њ–љ–љ–∞—П —В–µ—Е–љ–Є–Ї–∞ –Ї —Н—В–Њ–Љ—Г –≤—А–µ–Љ–µ–љ–Є –±—Л–ї–∞ –і–Њ—Б—В–∞—В–Њ—З–љ–Њ —А–∞–Ј–≤–Є—В–∞?
–Я—А–Є—З–Є–љ—Л —Н—В–Њ–≥–Њ –Ј–∞–Ї–ї—О—З–∞—О—В—Б—П –≤ —Б–ї–µ–і—Г—О—Й–µ–Љ.
1. –†–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А –љ–µ —А–∞–Ј–ї–Є—З–∞–µ—В –њ–∞—А—Г—Б–љ–Њ–µ –љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ
–Є–ї–Є –ґ–µ —Н—В–Њ —Б—Г–і–љ–Њ —Б –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–Є–Љ –і–≤–Є–≥–∞—В–µ–ї–µ–Љ; –Ј–∞–љ–Є–Љ–∞–µ—В—Б—П –ї–Є
–љ–∞–±–ї—О–і–∞–µ–Љ–Њ–µ —Б—Г–і–љ–Њ –±—Г–Ї—Б–Є—А–Њ–≤–Ї–Њ–є –і—А—Г–≥–Њ–≥–Њ —Б—Г–і–љ–∞ –Є–ї–Є –љ–µ—В; –Љ–Њ–ґ–µ—В
–ї–Є –Њ–љ–Њ —Б–≤–Њ–±–Њ–і–љ–Њ —Г–њ—А–∞–≤–ї—П—В—М—Б—П –Є–ї–Є –љ–µ—В –Є —В. –і.
2. –Э–µ –≤—Б–µ —Б—Г–і–∞ —Б–љ–∞–±–ґ–µ–љ—Л —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞–Љ–Є.
3. –Э–µ –≤—Б–µ —Б—Г–і–∞ –Њ–і–Є–љ–∞–Ї–Њ–≤–Њ –Є–Ј–Њ–±—А–∞–ґ–∞—О—В—Б—П –љ–∞ —Н–Ї—А–∞–љ–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞, –∞ –љ–µ–Ї–Њ—В–Њ—А—Л–µ –Є —Б–Њ–≤—Б–µ–Љ –љ–µ –і–∞—О—В —Н—Е–Њ-—Б–Є–≥–љ–∞–ї–∞.
4. –°–∞–Љ –њ—А–Є–±–Њ—А –љ–µ –і–Њ—Б—В–Є–≥ –µ—Й–µ —В—А–µ–±—Г–µ–Љ–Њ–є –њ—А–Њ—Б—В–Њ—В—Л –Є –љ–∞–і–µ–ґ–љ–Њ—Б—В–Є –і–µ–є—Б—В–≤–Є—П.
5. –Ш–Љ–µ—О—В—Б—П –њ–Њ–Љ–µ—Е–Є, –Ї–Њ—В–Њ—А—Л–µ –Є–љ–Њ–≥–і–∞ –њ—А–µ–њ—П—В—Б—В–≤—Г—О—В –љ–Њ—А–Љ–∞–ї—М–љ–Њ–є —А–∞–±–Њ—В–µ —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–∞.
6. –Э–∞–ї–Є—З–Є–µ –Љ–µ—А—В–≤–Њ–≥–Њ –њ—А–Њ—Б—В—А–∞–љ—Б—В–≤–∞, –Ї–Њ—В–Њ—А–Њ–µ –љ–µ –њ—А–Њ—Б–Љ–∞—В—А–Є–≤–∞–µ—В—Б—П —А–∞–і–Є–Њ–ї–Њ–Ї–∞—В–Њ—А–Њ–Љ –Є –≤–µ–ї–Є—З–Є–љ–∞ –Ї–Њ—В–Њ—А–Њ–≥–Њ –Ј–∞–≤–Є—Б–Є—В –Њ—В —В–Є–њ–∞ –њ—А–Є–±–Њ—А–∞
–Є –Њ—В —Б–њ–Њ—Б–Њ–±–∞ —Г—Б—В–∞–љ–Њ–≤–Ї–Є –µ–≥–Њ –љ–∞ —Б—Г–і–љ–µ.
(1) –Х. –ѓ. –©–µ–≥–ї–Њ–≤. –Ь–Њ—А—Б–Ї–Є–µ –љ–∞–≤–Є–≥–∞—Ж–Є–Њ–љ–љ—Л–µ —Г—Б—В—А–Њ–є—Б—В–≤–∞, 1954, —Б—В—А. 121.
–Т–њ–µ—А–µ–і
–Ю–≥–ї–∞–≤–ї–µ–љ–Є–µ
–Э–∞–Ј–∞–і
|
|
–У–ї–∞–≤–љ–Њ–µ –Ј–∞ –љ–µ–і–µ–ї—О
|





 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ

 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ
 –Т–∞–ґ–љ–Њ–µ
–Т–∞–ґ–љ–Њ–µ